

5G remote orthopedic operation robot combining virtual technology with 3D printing
A technology of 3D printing and orthopedic surgery, which is applied in the field of medical robots, can solve problems such as unavoidable medical injuries, and achieve the effects of reducing treatment costs, precise surgery, and reducing surgical risks
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
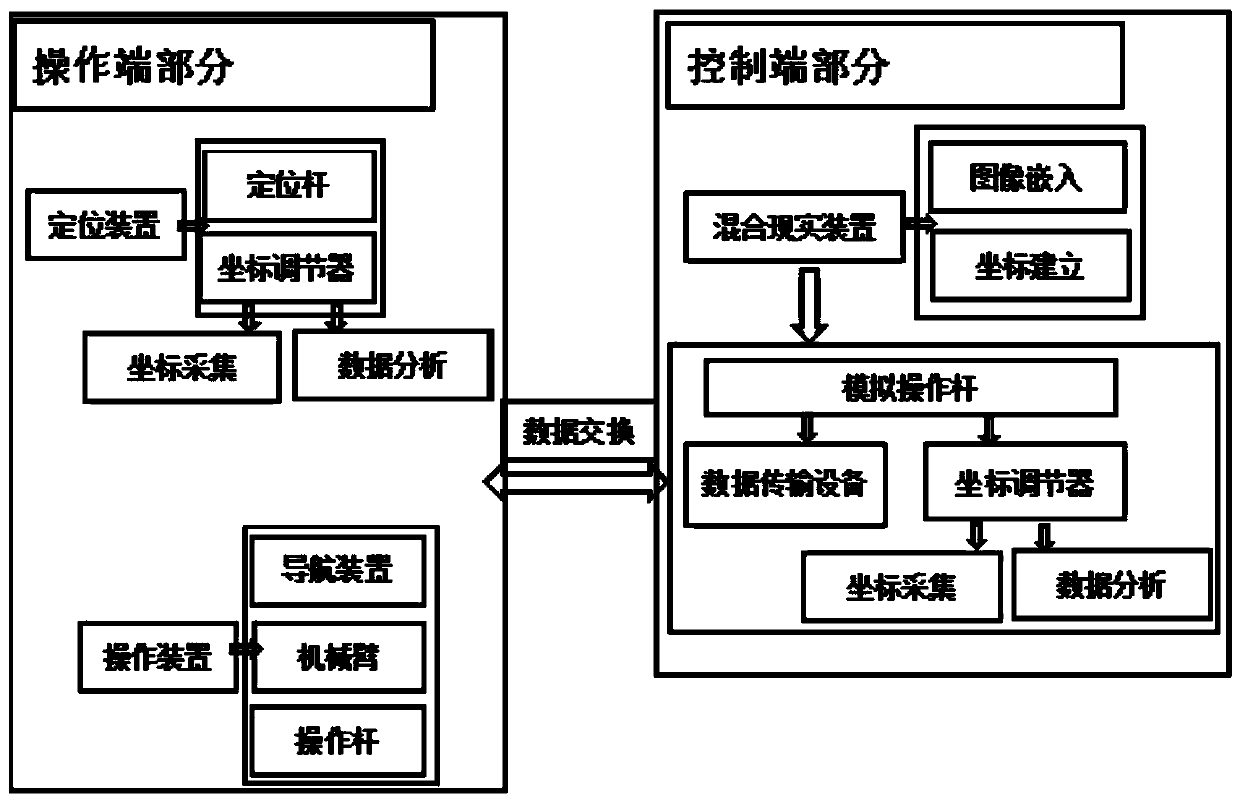
[0022] Embodiment: A 5G remote orthopedic surgery robot combined with virtual technology and 3D printing, including an operation end part and a control end part, and a network cable or a data cable is used for wired connection between the operation end part and the control end part, or WIFI or 5G network for long-distance communication connection.
[0023] The operating end part is divided into a surgical robot, including a positioning device and an operating device. The positioning device includes a positioning rod and a coordinate adjuster. The positioning rod receives the control of the control end part for displacement. Communicate with the console section. The operating device includes a navigation device, a mechanical arm and an operating rod. The navigation device communicates with the intraoperative control part, accepts instructions from the intraoperative control part, and controls the mechanical arm and the operating rod to perform operations.
[0024] The control ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More