

Six-degree-of-freedom cervical-vertebra grinding parallel robot
A degree of freedom, robotic technology, used in medical science, surgery, etc., can solve the problems of high workload, insufficient precision, and excessive radiation for doctors, and achieve the effects of compact structure, improved precision and quality, and reduced radiation dose.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
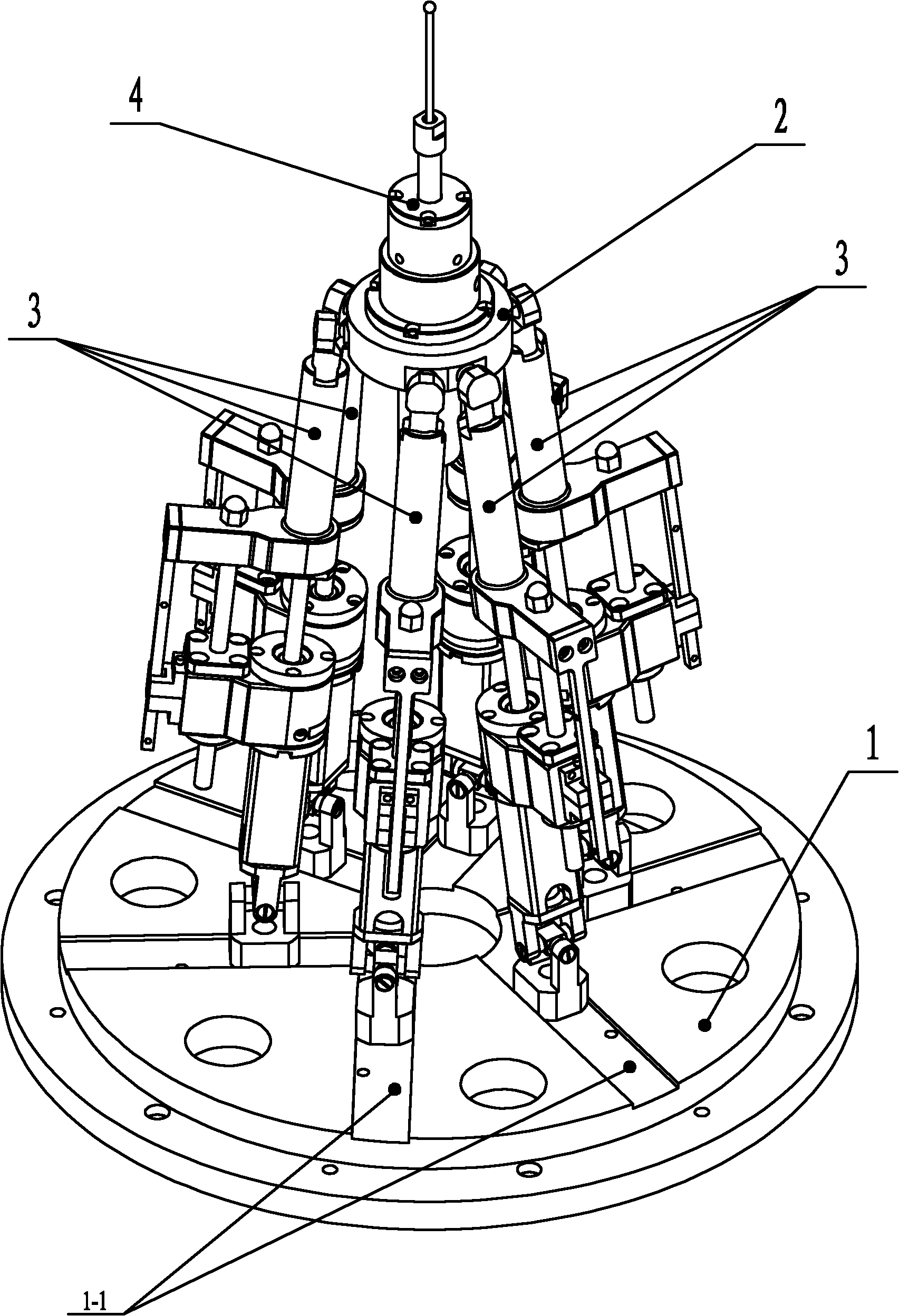
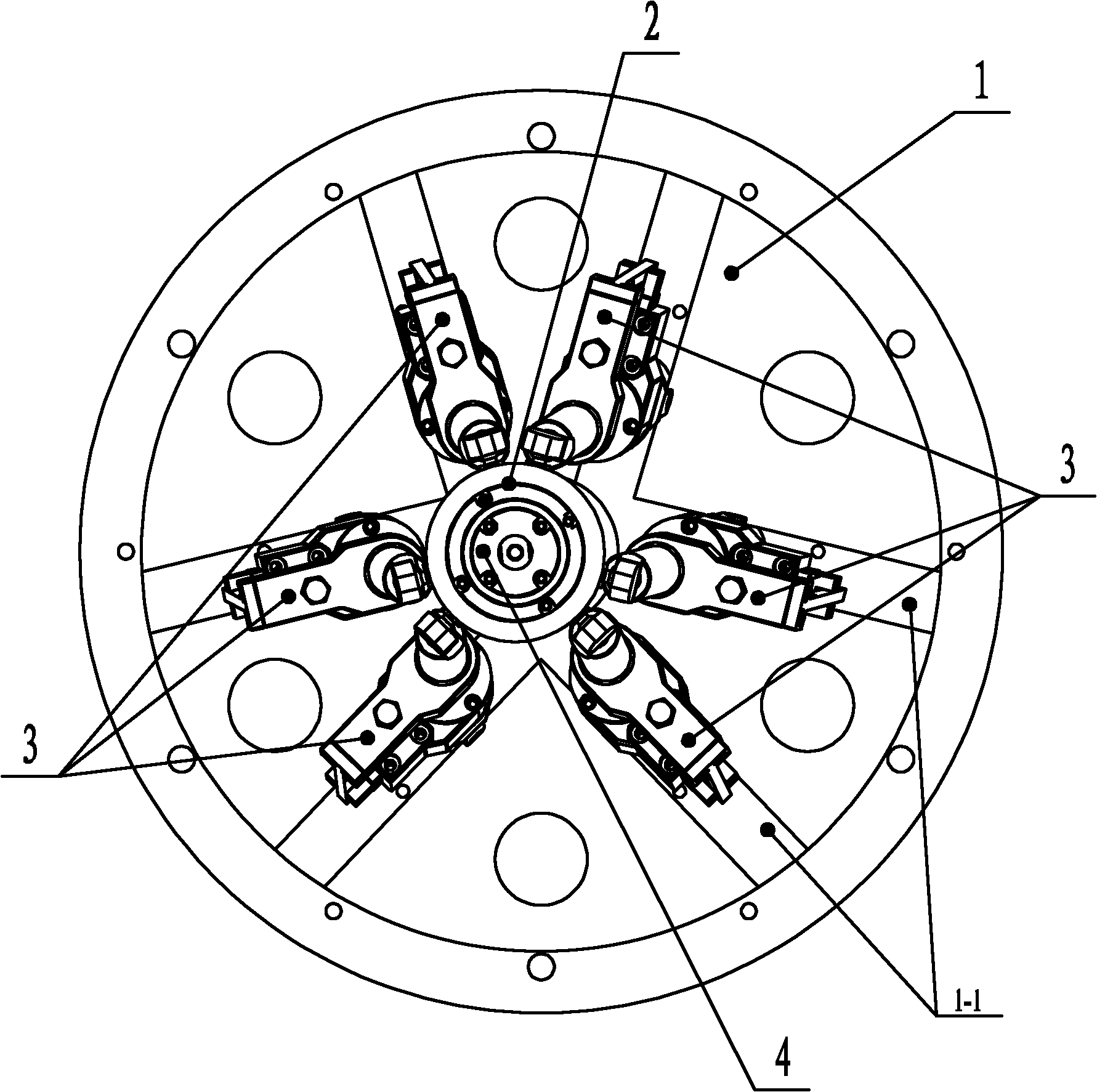
[0007] Specific implementation mode one: combine Figure 1-Figure 3 , Figure 5 , Figure 7 or Figure 8 , Figure 9 Describe this embodiment. The six-degree-of-freedom cervical vertebra grinding parallel robot in this embodiment includes a fixed platform 1, a moving platform 2, a grinding drill 4 and three pairs of branch chains. The fixed platform 1 and the moving platform 2 are connected by three pairs of branch chains. connection, each pair of branch chains includes two branch chains 3, and each branch chain 3 includes a ball hinge mechanism 3-1, a ball screw linear drive mechanism and a Hooke hinge mechanism 3-12, and the ball hinge mechanism 3-1 is arranged on the ball screw The upper end of the rod linear drive mechanism, the Hooke hinge mechanism 3-12 is arranged at the lower end of the ball screw linear drive mechanism, the ball hinge mechanism 3-1 is connected with the moving platform 2, the Hooke hinge mechanism 3-12 is connected with the fixed platform 1, and th...
specific Embodiment approach 2
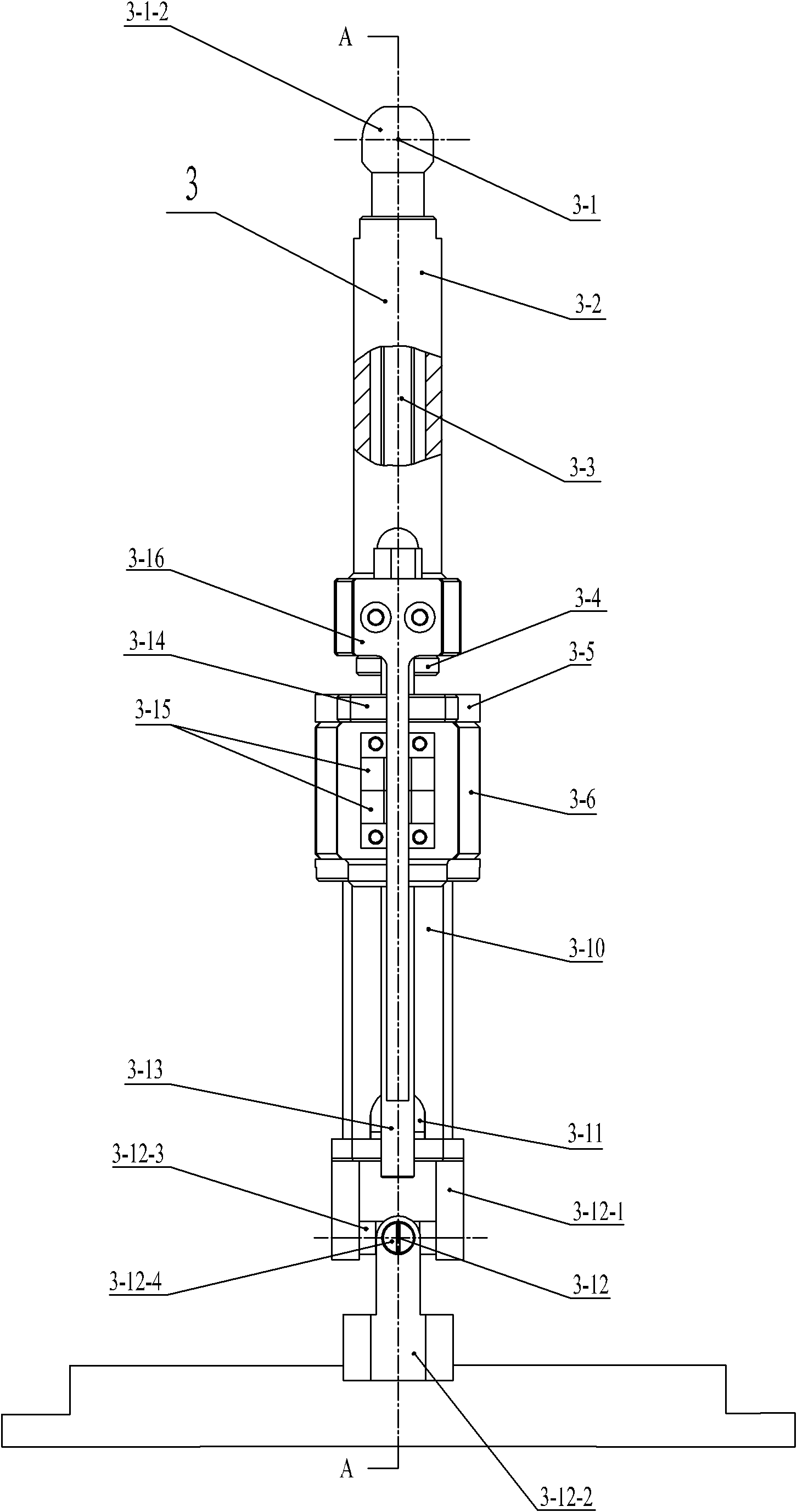
[0009] Specific implementation mode two: combination Figure 3-Figure 6 Describe this embodiment, the ball screw linear drive mechanism of this embodiment includes a branch chain front telescopic rod 3-2, a ball screw 3-3, a ball nut 3-4, a bearing end cover 3-5, and a branch chain motor connecting body 3 -6, Bearing Spacer 3-7, Lock Nut 3-8, Branch Chain Rear Rod 3-10, Branch Chain Motor 3-11, Hooke Hinge 3-12, Round Guide Rail 3-13, Linear Ball Guide Bushing 3-14 , two sensors 3-15, positioning block 3-16, two second bearings 3-18, the branch chain motor connection body 3-6 includes the first connection chamber 3-6-1 and is parallel to the first connection chamber and The second connection cavity 3-6-2 is offset by a certain distance, one end of the ball screw 3-3 is installed in the front expansion rod 3-2 of the branch chain, and one end of the ball screw 3-3 is installed in the ball nut 3-4 , the ball nut 3-4 is fixedly connected on the front expansion rod 3-2 of the bra...
specific Embodiment approach 3
[0010] Specific implementation mode three: combination Figure 5 Describe the present embodiment, the ball screw linear drive mechanism of the present embodiment also includes jackscrew cover 3-9 and jackscrew 3-17, is provided with jackscrew hole on branch chain motor connecting body 3-6, and jackscrew cover 3- 9 is arranged on the jacking screw hole, and the input end of the ball screw 3-3 is connected with the output shaft end of the branch chain motor 3-11 through the jacking screw 3-17. Such setting facilitates the installation of the top wire 3-18, and facilitates the replacement and tightening of the top wire 3-18. Other components and connections are the same as those in the second embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More