

Parallel-driven four-degree-of-freedom series-parallel mechanical wrist swing head
A degree of freedom, hybrid technology, used in manipulators, program-controlled manipulators, joints, etc., can solve the problems of low machining accuracy, large cumulative error, poor stiffness, etc., to ensure its own stiffness, ensure machining accuracy, and large work. effect of space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] Exemplary embodiments, features, and performance aspects of the present invention will be described in detail below with reference to the accompanying drawings. The same reference numbers in the figures indicate functionally identical or similar elements. While various aspects of the embodiments are shown in drawings, the drawings are not necessarily drawn to scale unless specifically indicated.
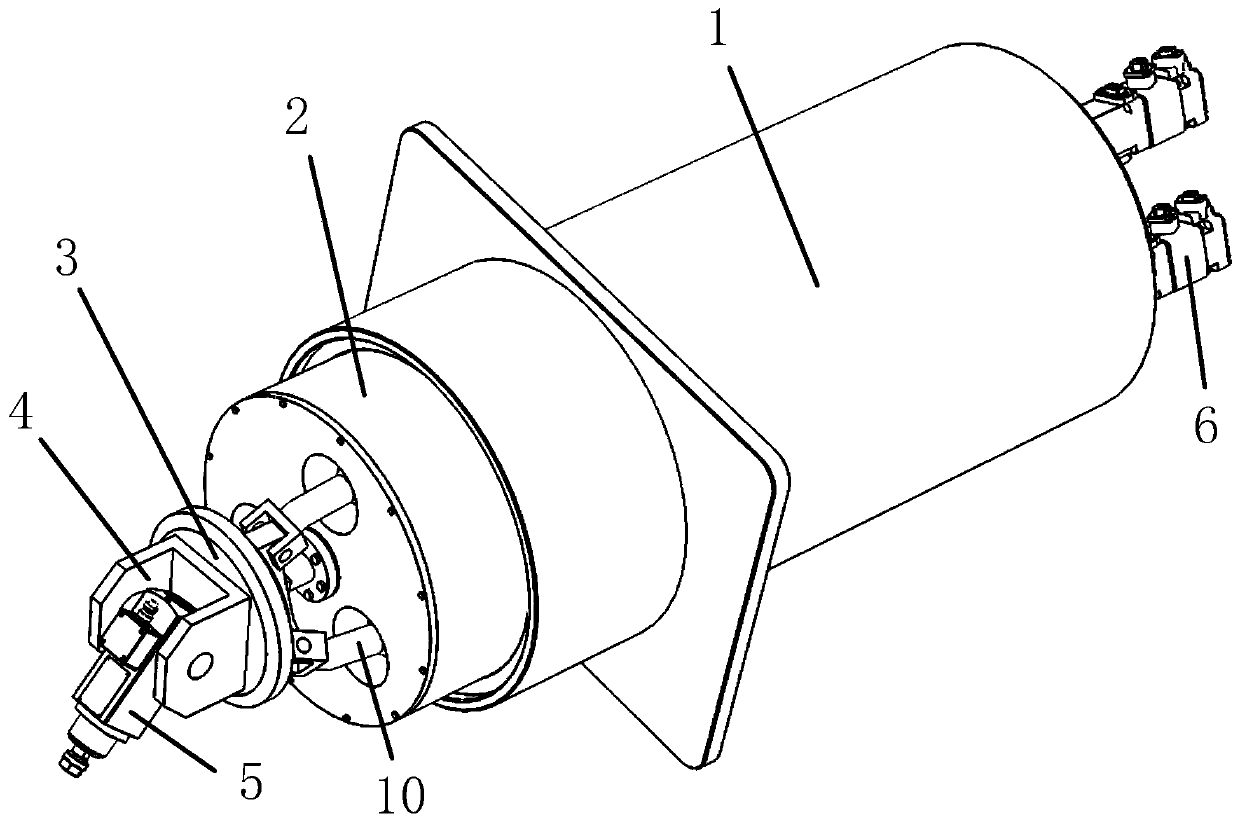
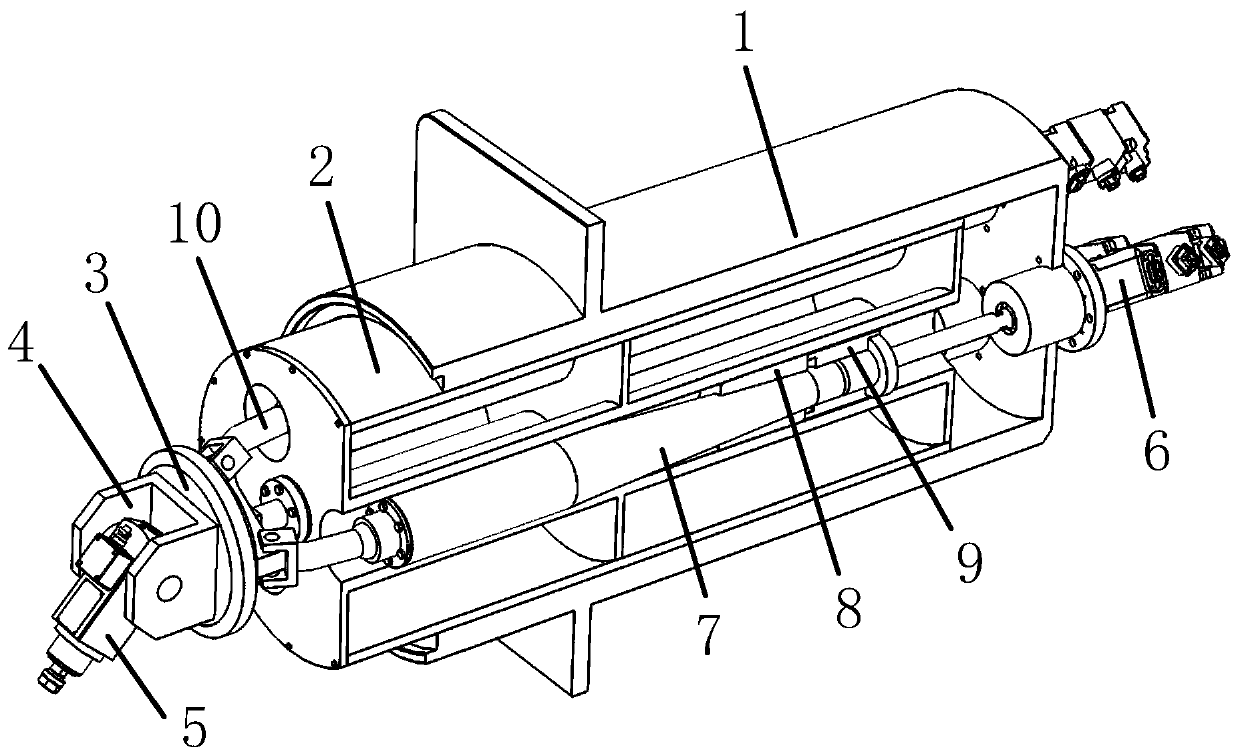
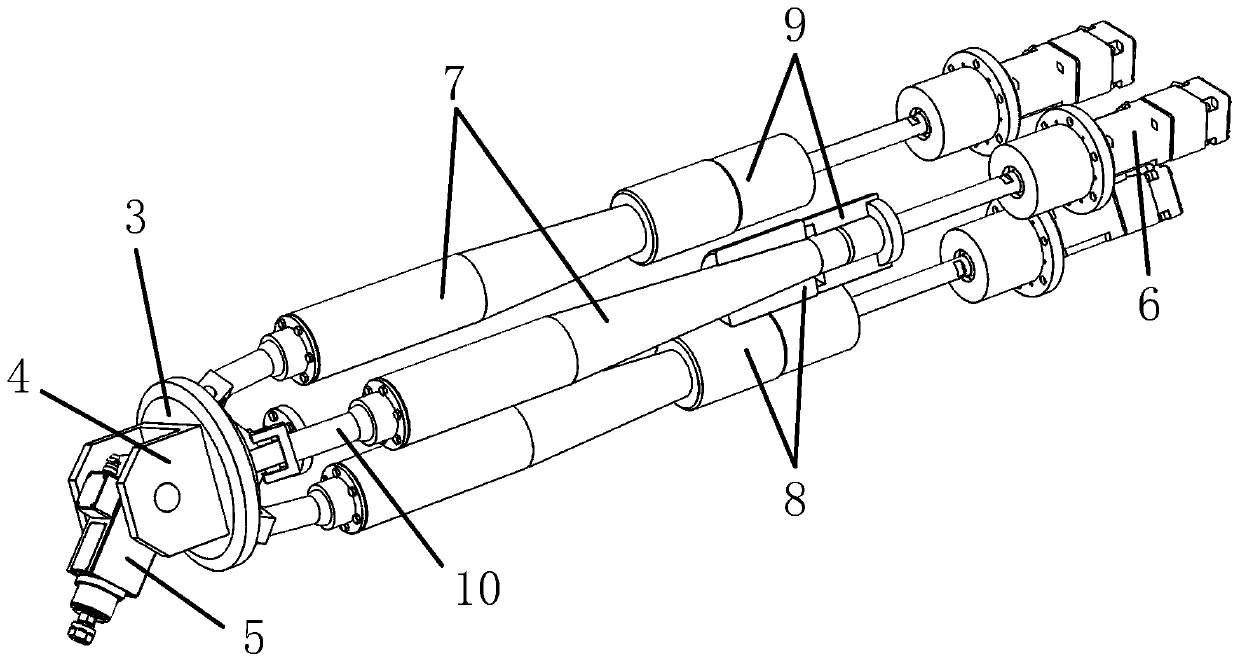
[0024] The parallel-driven four-degree-of-freedom mixed mechanical wrist swing head of the present invention can ensure high machining accuracy, and the transmission chain is relatively short, and at the same time, the rigidity is relatively large, and through the mixed application of the parallel mechanism and the series mechanism, the parallel drive The four-degree-of-freedom hybrid mechanical wrist swing head also has a large working space.
[0025] Parallel-driven four-degree-of-freedom hybrid mechanical wrist swing head according to an embodiment of the present invention...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More