

Flexible finger control method
A technology of flexible fingers and control methods, applied in manipulators, manufacturing tools, chucks, etc., can solve the problems of complex control methods, high prices, and increased user costs.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
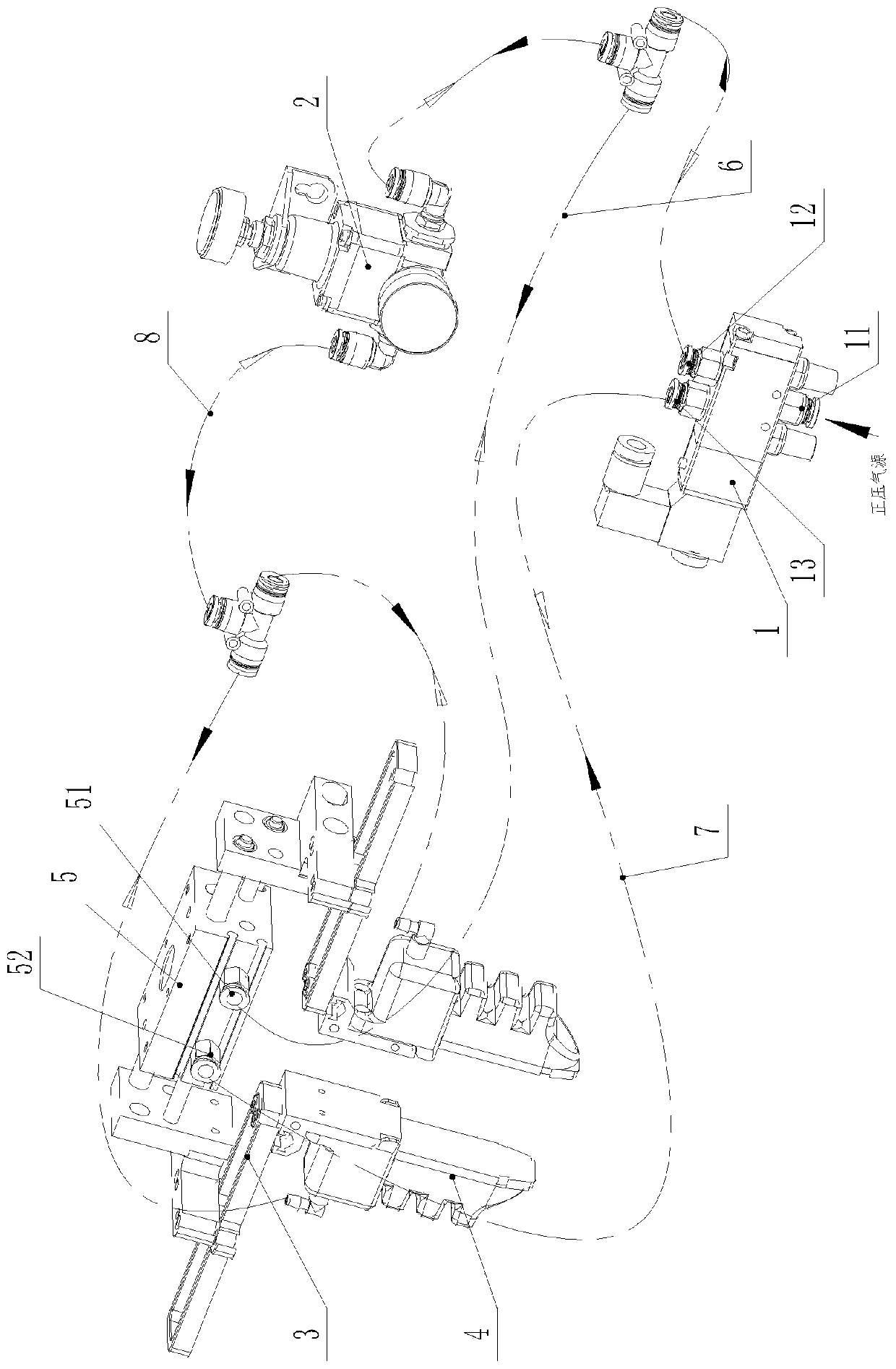
[0042] The pneumatic actuator in this embodiment is a pneumatic clamping mechanism, and the flexible finger 4 is installed on the execution end of the pneumatic clamping mechanism; Pressure, the pneumatic clamping mechanism drives the flexible finger 4 to move and cooperates with the positive pressure bending deformation of the flexible finger 4 to form a combined clamping force; when the clamping force needs to be released, the pneumatic clamping mechanism drives the flexible finger 4 to reset, and the flexible finger 4 releases pressure Reset to release the clamping force.
[0043] However, the pneumatic clamping mechanism in this embodiment adopts a linear translational pneumatic opening and closing mechanism 3 . Such as figure 1 As shown, the linear translation opening and closing mechanism 3 includes a guide plate 31, and the guide plate 31 is provided with a guide chute 32, and a finger mounting plate 33 is slidably installed in the guide chute 32, and the flexible fing...
Embodiment 2
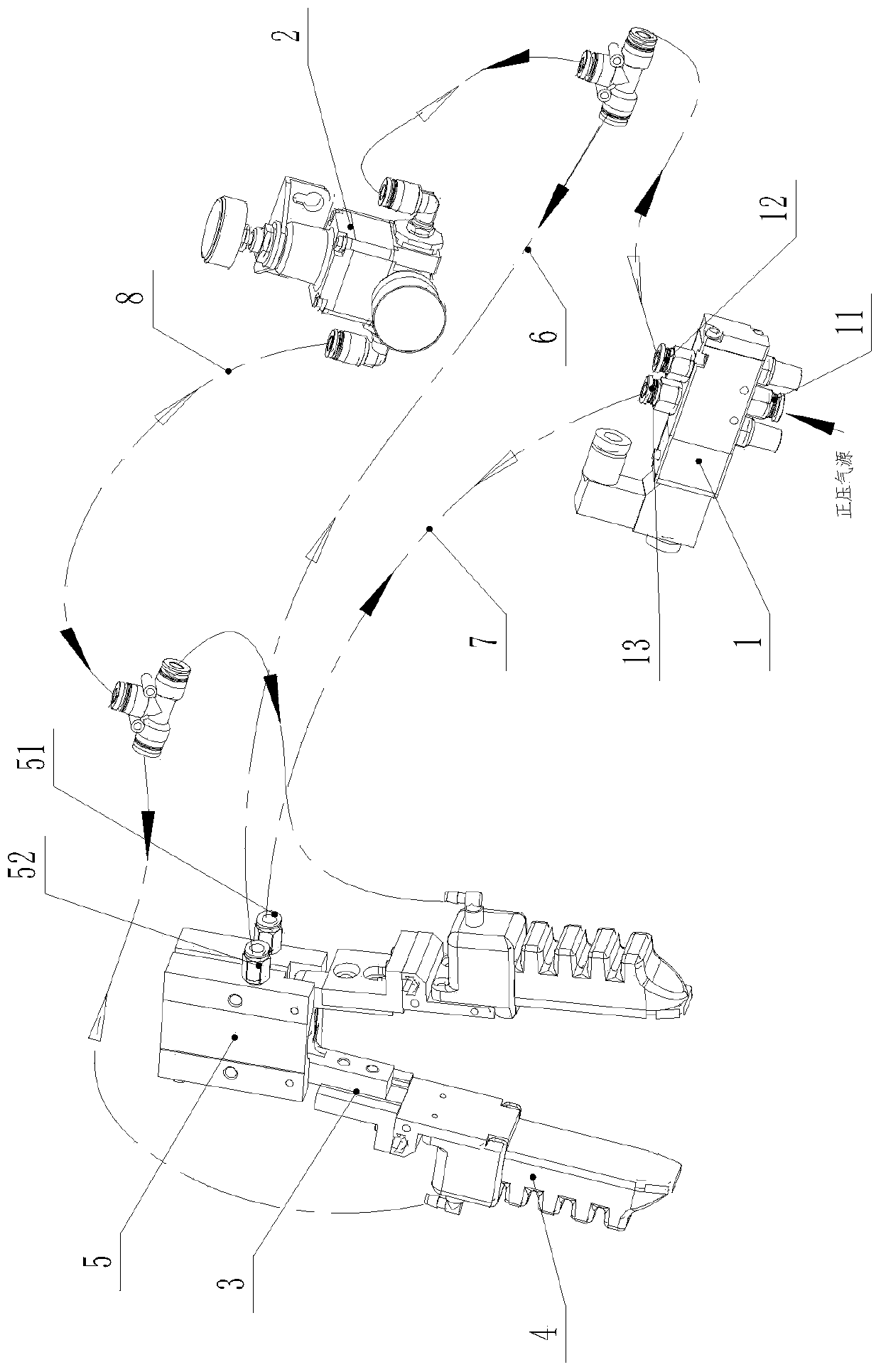
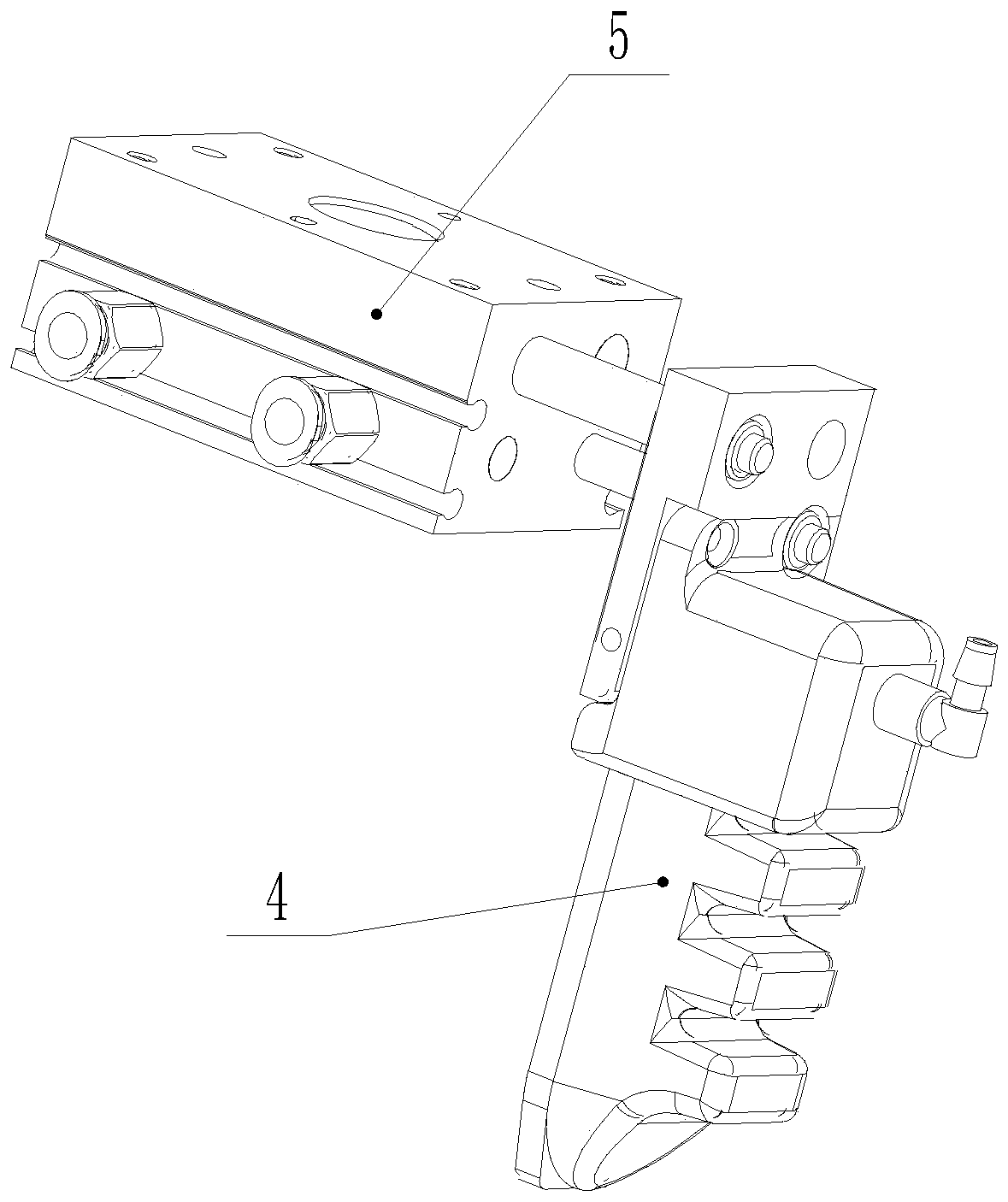
[0054] The structure of this embodiment is similar to that of Embodiment 1, except that the pneumatic actuator is a cylinder 5, and the flexible finger 4 is installed on the execution end of the cylinder 5; in this embodiment, the flexible finger 4 is directly installed on the cylinder 5 execution side, such as figure 2 As shown, the cylinder 5 is a Y-shaped jaw cylinder 5, and the Y-shaped clamping cylinder 5 can drive the deflection of the flexible finger 4, thereby completing the mobile drive of the flexible finger 4.
[0055] When it is necessary to provide clamping force, the positive pressure air supply system provides positive pressure on the flexible finger 4, and the cylinder 5 drives the flexible finger 4 to move and cooperate with the positive pressure bending deformation of the flexible finger 4 to form a combined clamping force; when it is necessary to release the clamping force , the cylinder 5 drives the flexible finger 4 to reset, and the flexible finger 4 rel...
Embodiment 3
[0059] Such as Figure 4 As shown, the structure of this embodiment is basically the same as that of Embodiment 1, except that the installation of the flexible fingers 4 is changed, and the bottom plate of the flexible fingers 4 faces outward, so that the clamping force can be provided from the inside out. When providing the clamping force, the action of the cylinder 5 is from the inside to the outside, thereby jointly providing the clamping force from the inside to the outside. Correspondingly, when resetting, both the flexible finger 4 and the cylinder 5 can be reversely reset.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More