

Implementation method of multithread distributed SLAM system based on ROS environment
An implementation method and multi-threading technology, applied in radio wave measurement systems, electromagnetic wave re-radiation, complex mathematical operations, etc., can solve the problems of small amount of calculation, no real-time data processing and timeliness, etc., to optimize system performance and improve the system performance effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0094] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
[0095] The technical scheme that the present invention adopts is the realization method based on the multi-threaded distributed SLAM system under ROS environment, and the concrete steps of this realization method are as follows:
[0096] Step 1: Build an information data collection system.
[0097] According to the information collection and transmission methods between the sensors, a multi-sensor information data collection system with lasers, odometers, magnetic compass and other sensors is constructed. After power-on, the laser sensor and magnetic compass start data collection and data transmission, and clock match different sensor data, and save the odometer data, laser scanning data, and compass heading data in a unified data format, so that Distributed SLAM algorithm for subsequent multi-threading.
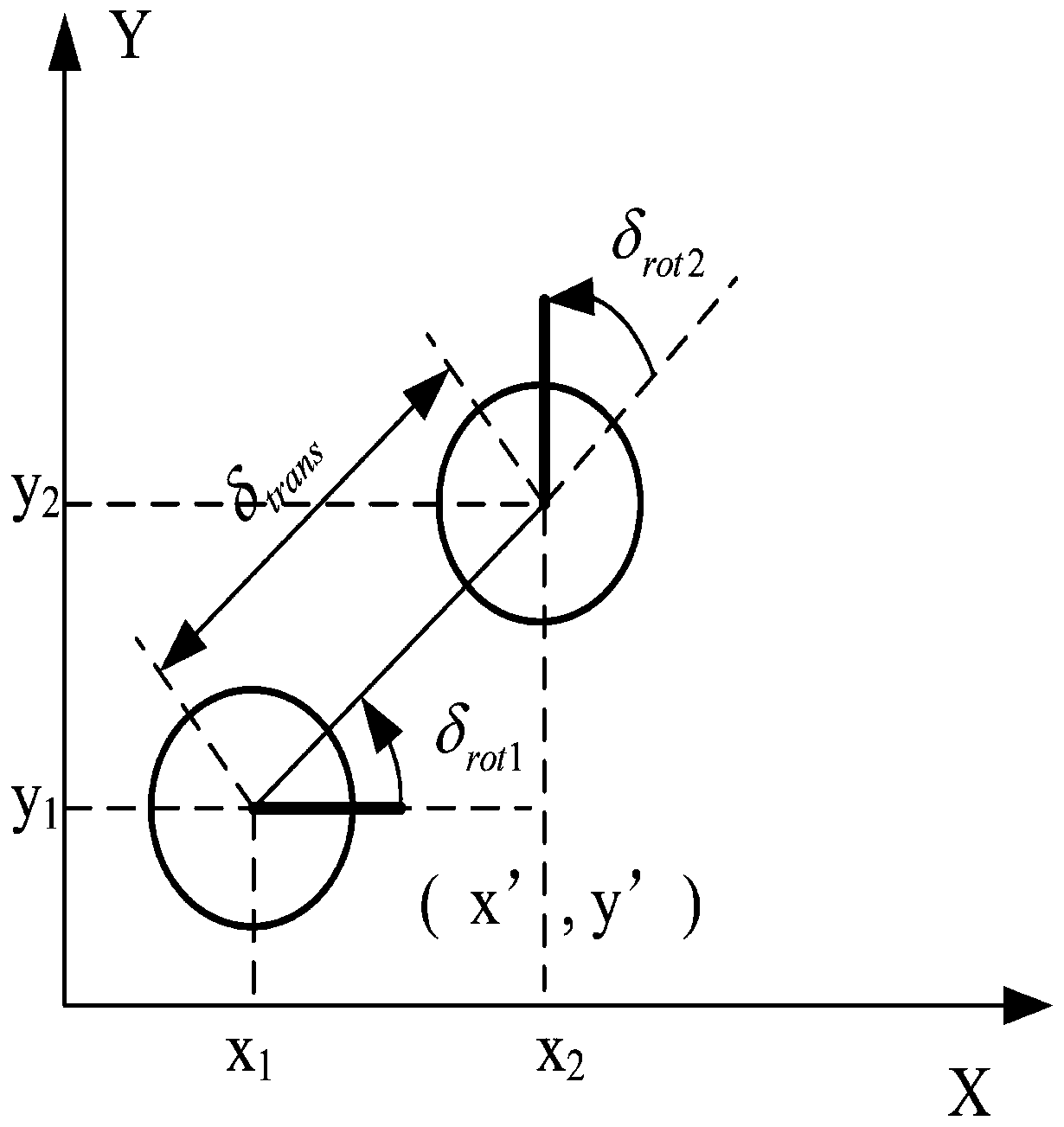
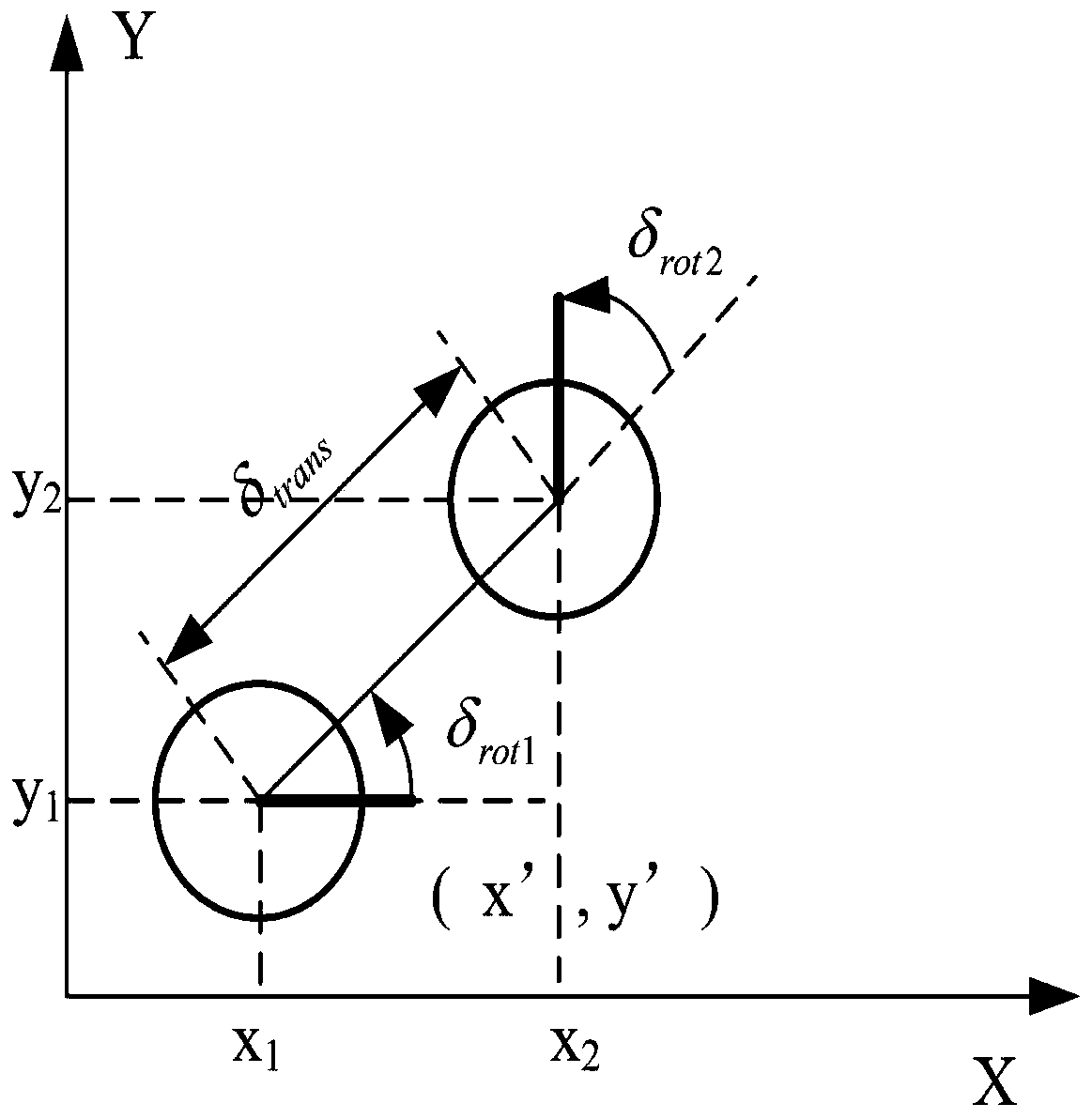
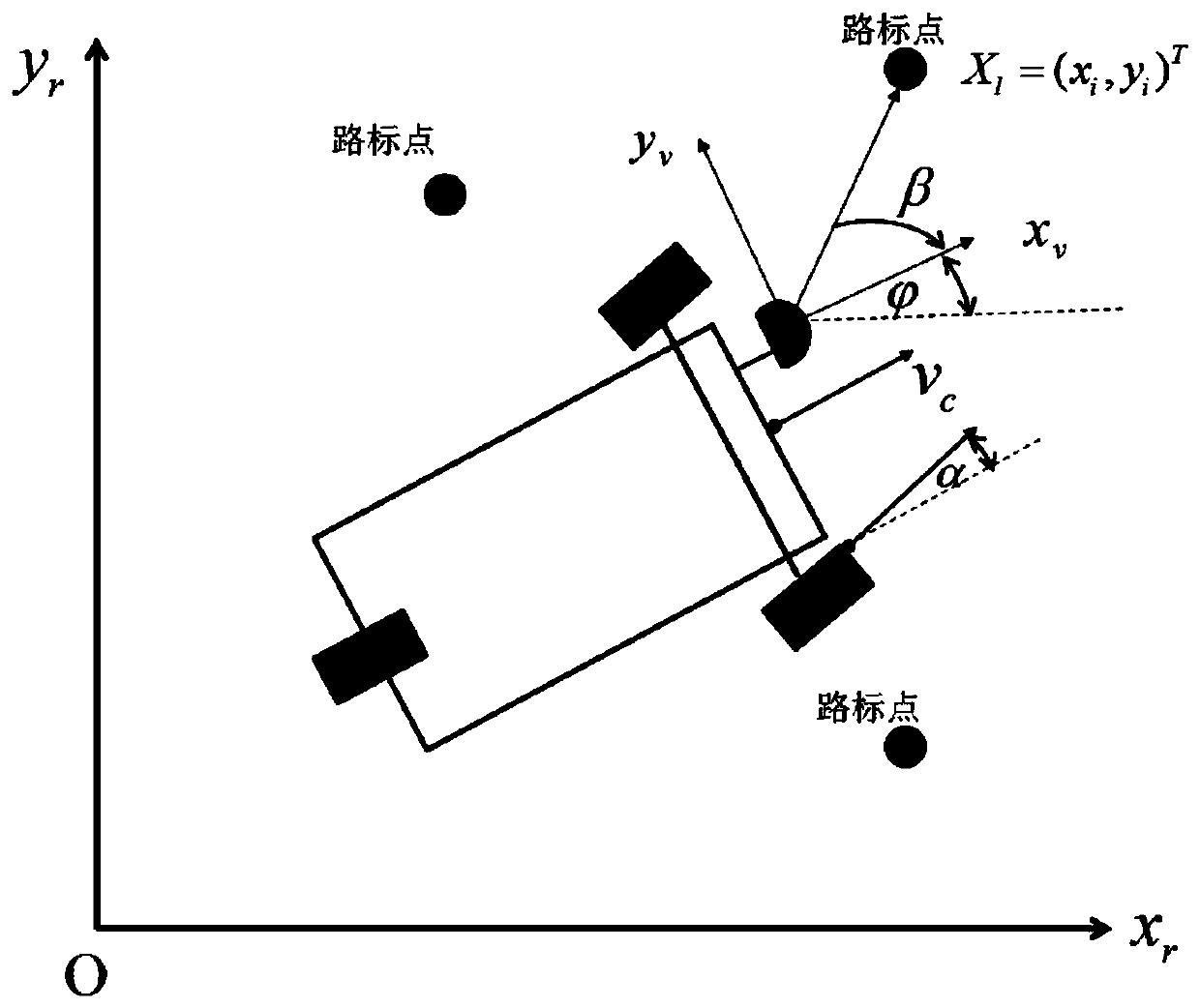
[0098] Step 2: Model establishment.
[009...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More