

Time-varying reliability evaluation method for uncertain PID control system
A control system, uncertainty technology, applied in the direction of controllers with specific characteristics, electric controllers, electrical testing/monitoring, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0129] Such as Figure 4 As shown, the 5-DOF mass spring damping system has degrees of freedom only in the direction of horizontal motion, the mass of each mass m=1kg, the spring stiffness k=1000N / m, and the damping c=1N / ms -1 . A horizontal pulse load f(t) with an amplitude of 10000N is applied to the mass 5. Both mass m and stiffness k have uncertainties. Let the horizontal displacement response of mass block 5 be Y(m).
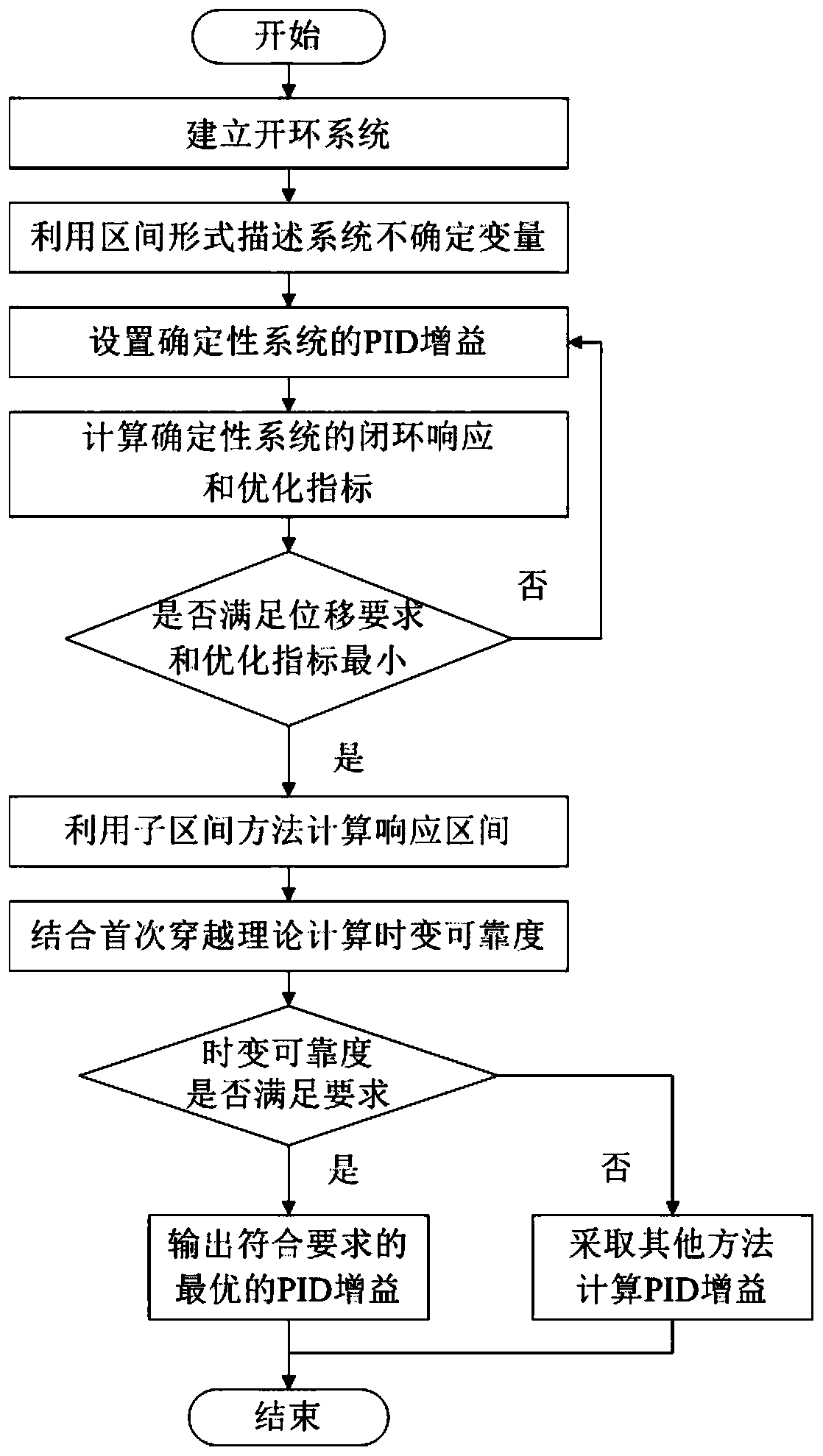
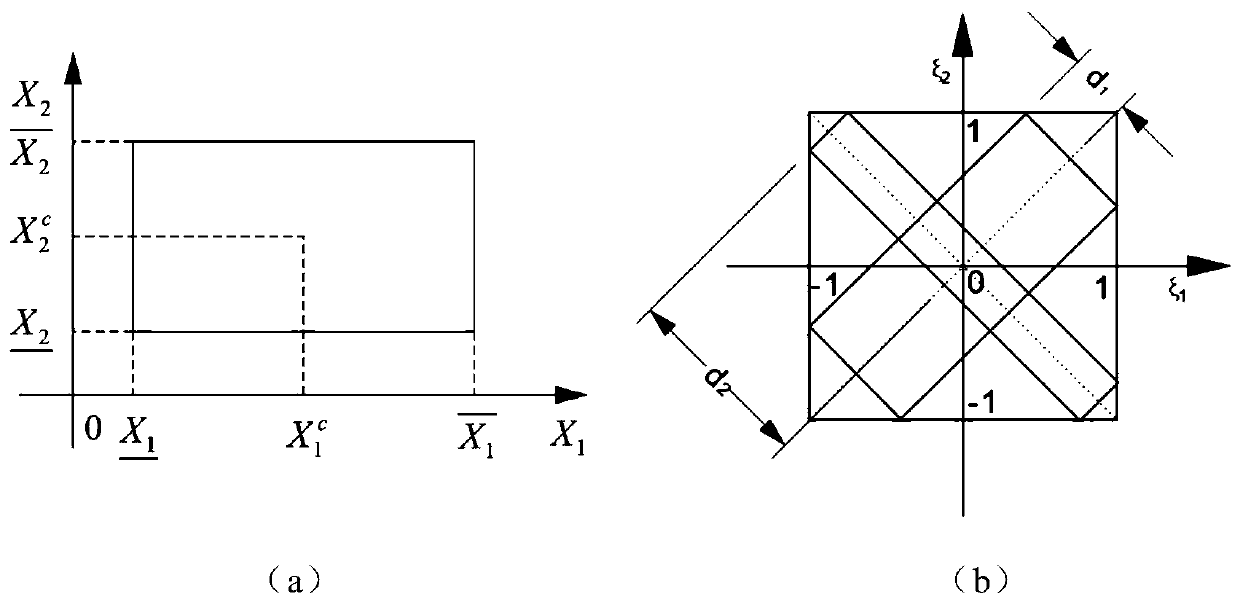
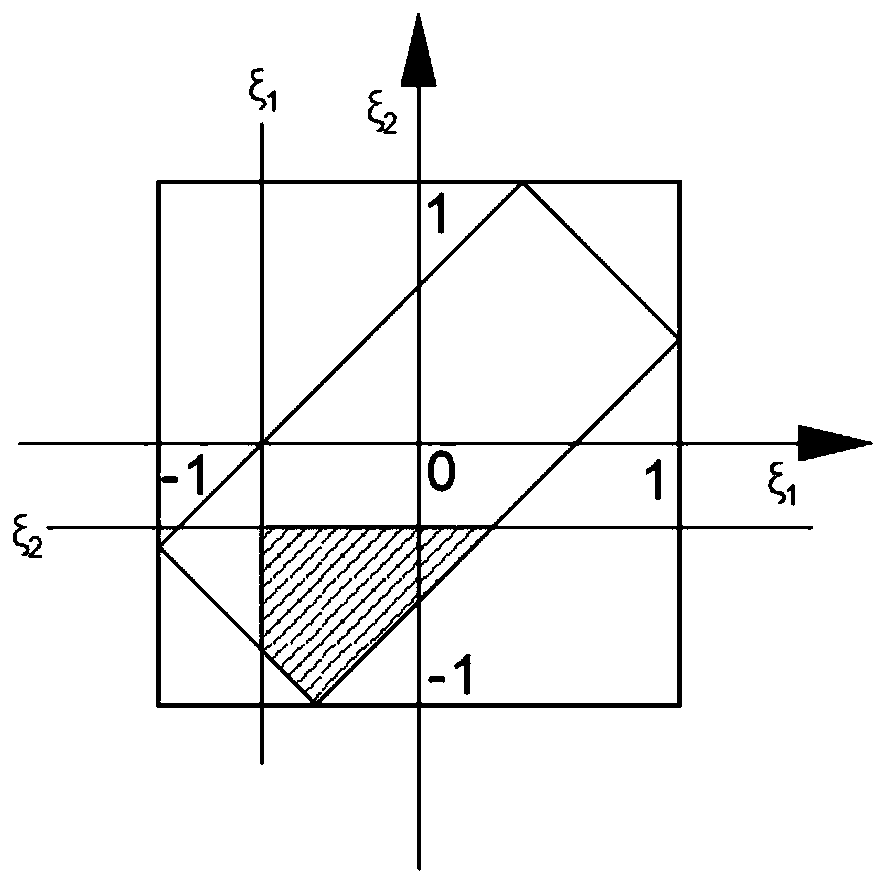
[0130] The open-loop response of the system is as Figure 5 (a) shown. The requirement for the closed-loop response is: at t 0 = After 1s, the displacement amplitude of mass block 5 does not exceed y cr = 0.02m. Optimized to get J min =6.9773, at this time K P =0,K I =0,K D = 5.22. Considering the uncertainty of mass matrix and stiffness matrix, the uncertain variable interval is divided into 5 subintervals for calculation. When the uncertainty of mass matrix and stiffness matrix is 5%, the closed-loop response interval is as follows Figure...
Embodiment 2
[0137] Such as Figure 6 Shown is a 10m×4m sheet with a density of ρ=7850kg / m 3 , elastic modulus E = 210GPa, Poisson's ratio μ = 0.3, plate thickness d = 0.1m. The damping adopts Rayleigh damping C=αM+βK, taking Rayleigh damping coefficient α=0.5, β=0.0002. Both mass m and stiffness k have 5% uncertainty. Now, the two corners at the left end of the plate model constrain the translational degrees of freedom in three directions, and the vertical plate at the two corners at the right end applies different loads in the in-plane direction as the initial disturbance. The disturbance load is as follows: Figure 7 As shown in (a), the black circle point is used as the observation position.
[0138] The open-loop response of the system is as Figure 7 (b) shown. The requirement for the closed-loop response is: the displacement amplitude of the observation point does not exceed y cr = 0.3m. Consider applying single-group PID control and applying dual-group PID control, respectiv...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More