

Collision distance calculation method and system based on fusion of ultrasound wave and camera
A calculation method, ultrasonic technology, applied in the re-radiation of sound waves, radio wave measurement systems, re-radiation of electromagnetic waves, etc., can solve the problem of ultrasonic sensors not participating in the fusion of camera and lidar information, binocular ranging sensors, and CCD camera processing The cost of the device is high, and the impact of the collision distance and collision time is not considered, so as to achieve the effects of mass promotion and application, reliable detection, and improved relative position accuracy of detection
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment
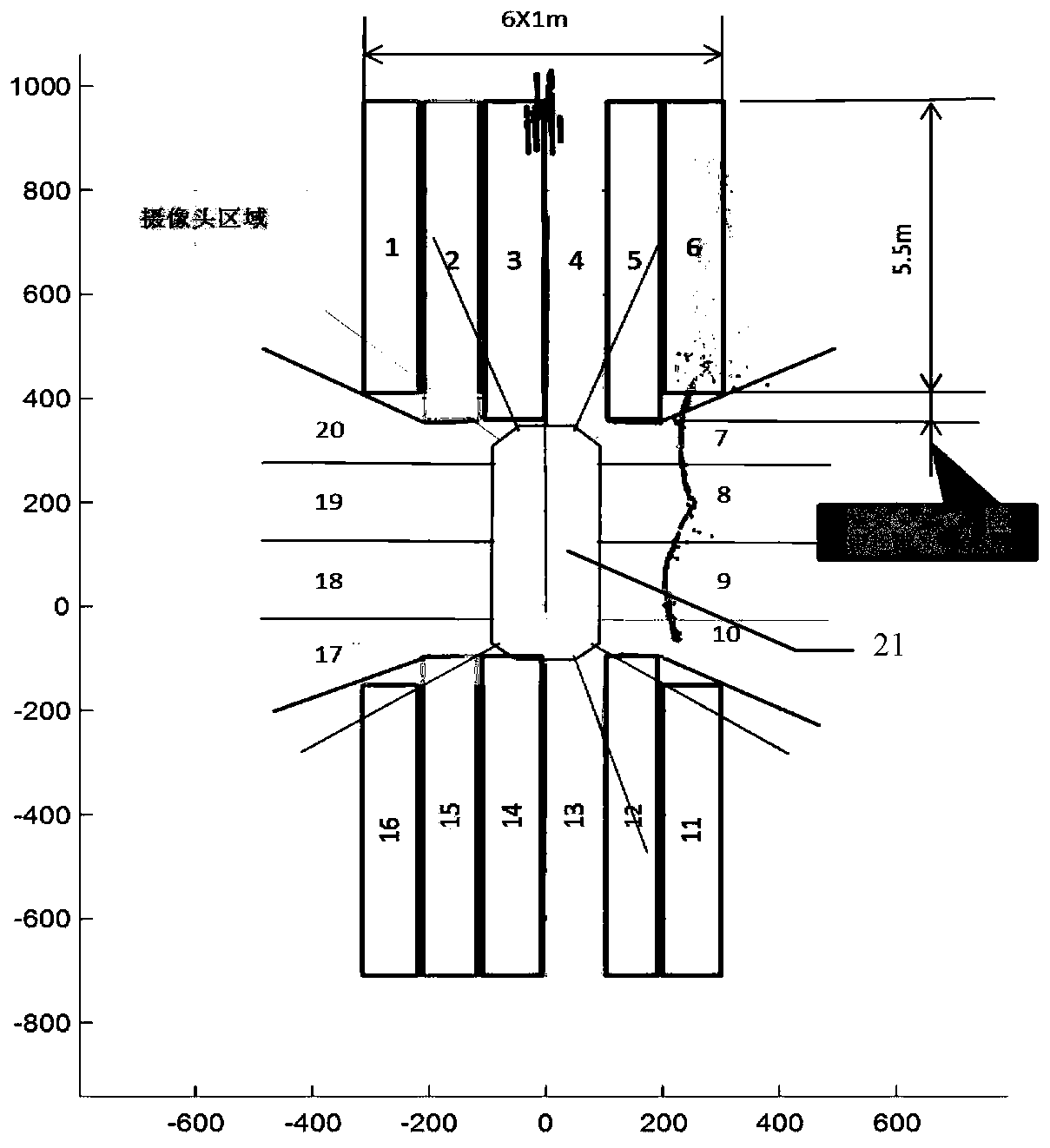
[0042] see figure 1 , is the vehicle area division in this embodiment. Divide the front and rear of the vehicle 21 from the center line of the vehicle into 6 areas of 6×1 meters every 1 meter, and divide the left and right into 4 areas according to the ultrasonic detection area, of which 8, 9, 18, and 19 respectively Rear axle center and wheelbase center division. When the driving direction of the vehicle is forward, when turning counterclockwise, the ROI is 1---6 and 17---20, when there is no steering, the ROI is 1---6, when turning clockwise, the ROI 1---10. Similarly, if you are driving backwards and turning counterclockwise, the area of interest is 7---16, when not turning, it is 11---16, and when turning clockwise, it is 11---20.
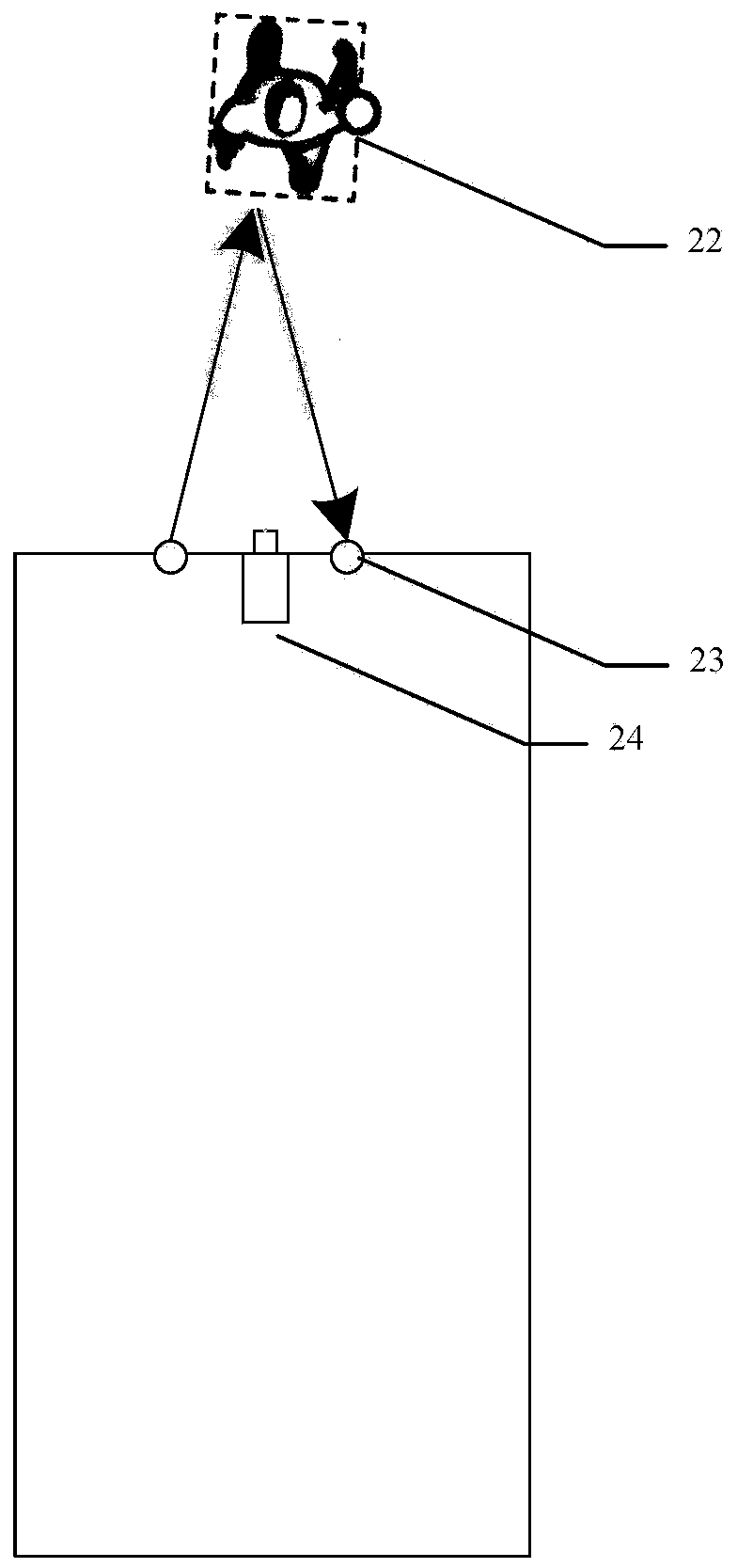
[0043] see figure 2 , in this embodiment, 12 ultrasonic sensors and 4 surround-view CMOS cameras installed around the vehicle detect the surroundings of the vehicle, divide the surroundings of the vehicle into 20 areas according to the d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More