

Accurate repeat positioning method for indoor autonomous navigation robot
A technology of repeated positioning and autonomous navigation, applied in the field of intelligent robots, can solve problems such as large positioning deviation, code disc detection error, inability to effectively eliminate error accumulation, etc., to achieve precise positioning and meet the effect of using time limit.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0041] By collecting a large amount of robot operation data, it is found that there is a large deviation between the positioning coordinates of the robot in the long direction of the corridor and the ideal value, and the positioning coordinates in the direction perpendicular to the direction of the corridor are relatively close to the ideal coordinates, which meets the positioning requirements. This method is mainly aimed at correcting the positioning coordinate error of the robot in the longer direction of the corridor.
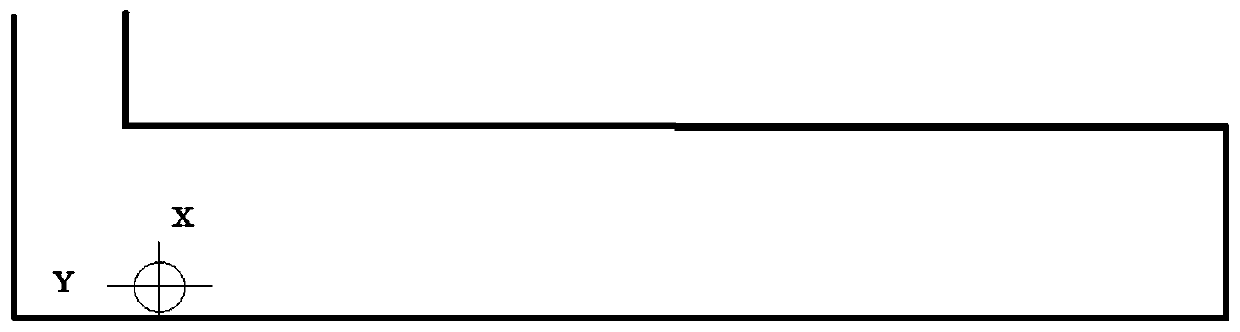
[0042] Navigation point settings such as figure 2 As shown, the schematic diagram of navigation point coordinate setting is shown in image 3 shown. The navigation points are equally spaced and located on the same straight line. When the robot moves along the navigation points in the long direction of the corridor, the speed information uploaded by the robot odometer can be seen that the y-axis coordinates of the robot in the map coordinate system are basi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More