

Multi-material manipulator
A manipulator, multi-material technology, applied in the field of manipulators, can solve the problems of low rigidity of constituent materials, inability to withstand large loads or self-weight, etc., and achieve the effect of meeting strength requirements and low cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
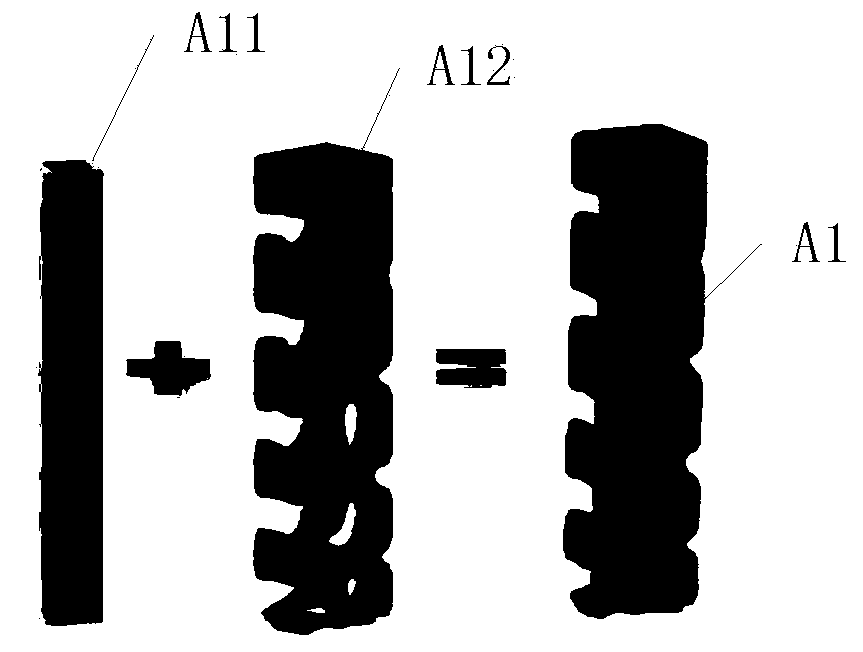
[0041] Such as figure 1 As shown, a multi-material manipulator according to an embodiment of the present invention is provided. The multi-material manipulator A1 includes a soft material part A11 obtained by integral injection molding (the prior art) and a hard material part A12 obtained by a 3D method. The material part A12 is hollow, and the soft material matching A11 is arranged in the hollow of the hard material part A12.
[0042] In another embodiment, the soft material part A11 refers to a hollow rectangular tube made of silica gel; the hard material part A12 refers to a hollow hinge made of TPE.
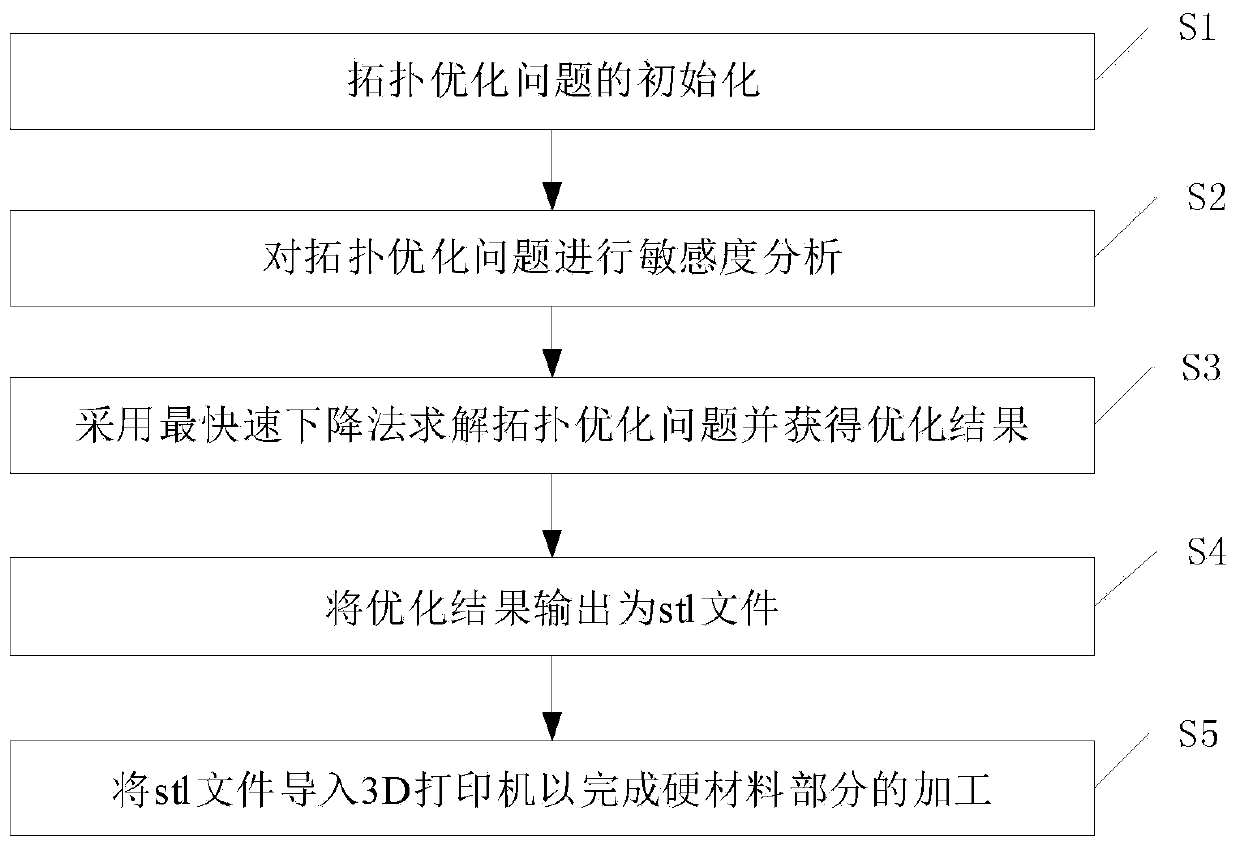
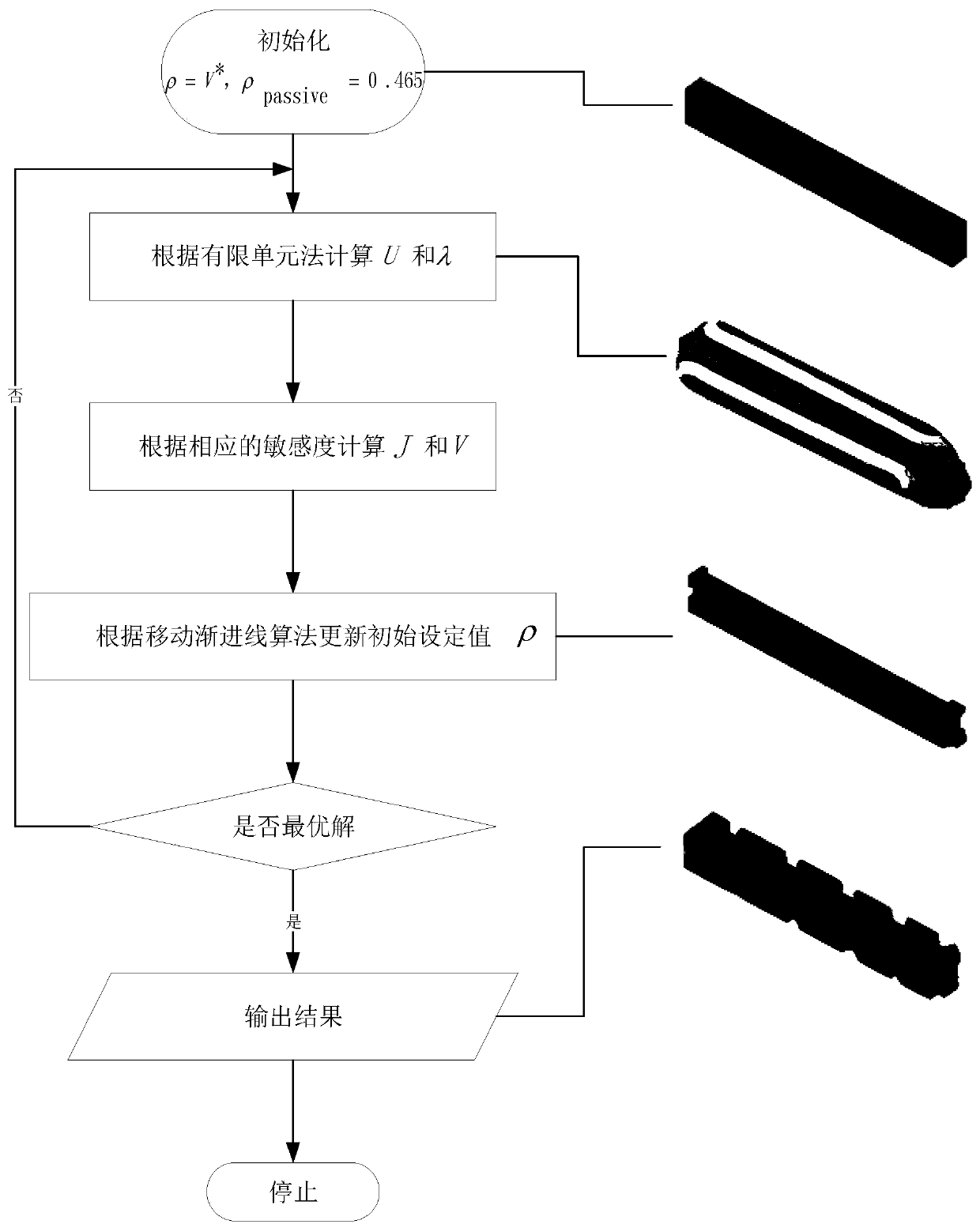
[0043] Such as figure 2 with image 3 As shown, the steps to obtain the hard material part A12 through 3D are as follows:
[0044] S1: Initialization of the topology optimization problem: given the design domain, design variables and constraints of the hollow cuboid of the hard material part A12;
[0045] The initialization of the topology optimization problem is simplifi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More