

Error calibration method based on SINS (Strapdown Inertial Navigation System)/DVL (Doppler Velocity Log) integrated navigation
A combined navigation and error calibration technology, applied in the field of navigation, can solve problems such as inaccurate and stable calibration results, complicated scheme implementation, and calibration coefficient errors, and achieve the effects of verifying correctness, improving reliability, and improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0031] The present invention will be further described in detail below through the specific examples, the following examples are only descriptive, not restrictive, and cannot limit the protection scope of the present invention with this.
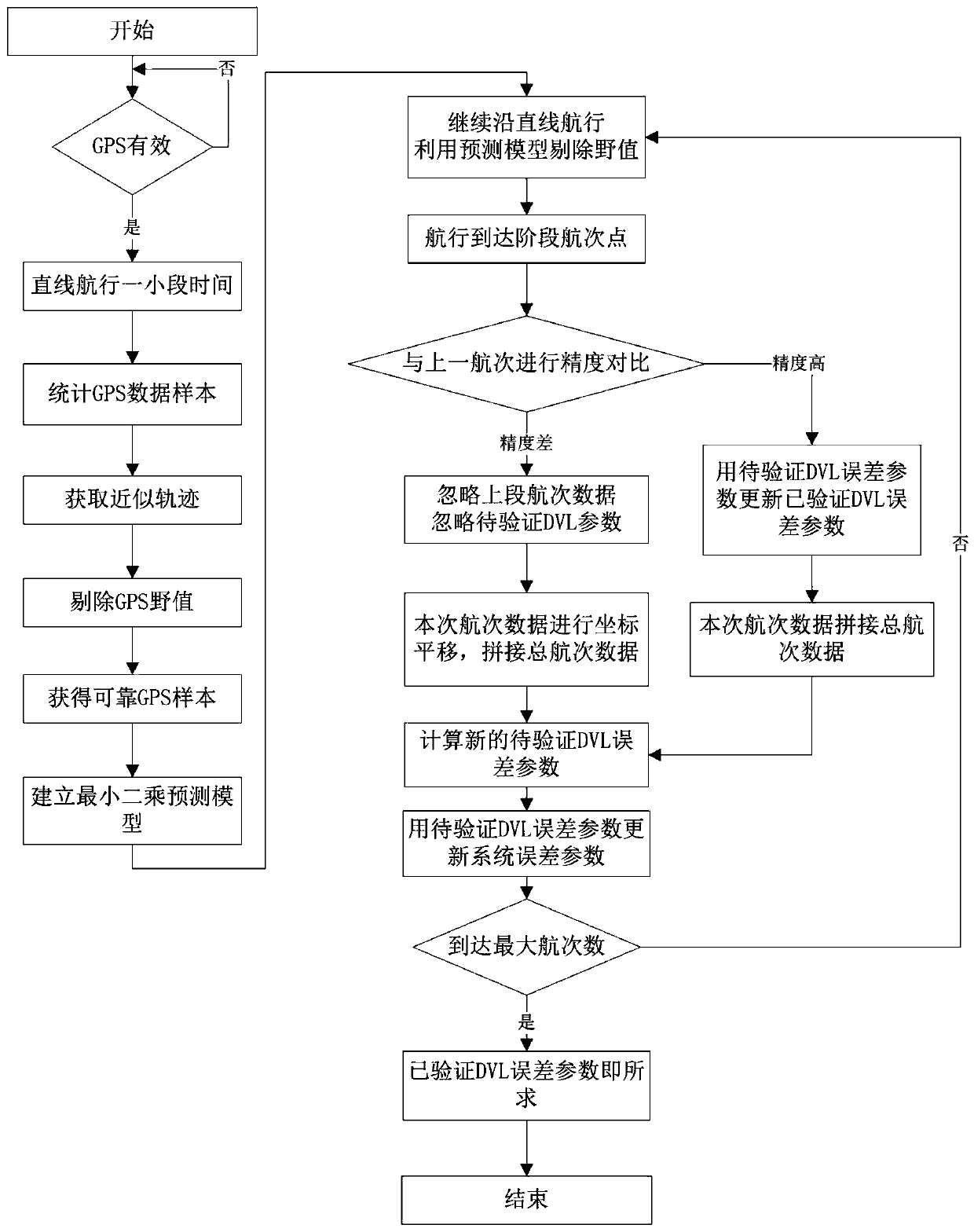
[0032] A method based on SINS / DVL integrated navigation error calibration, the theoretical derivation process is as follows: in the process of SINS / DVL integrated navigation, the main error sources include the scale coefficient error of DVL and the installation error between the carrier and DVL. In order to improve the speed measurement accuracy of DVL, it is necessary to perform calibration compensation for DVL installation error and scale coefficient error. Let the DVL carrier coordinate system be the m system, the inertial navigation system carrier coordinate system be the b system, and the inertial navigation system navigation coordinate system be the geographic coordinate system n system. The projection relationship with the DVL velocit...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More