

Stewart stable platform control method based on RBF neural network
A stable platform and neural network technology, applied in the field of Stewart stable platform control based on RBF neural network, can solve problems such as synthetic pose errors, overcome assembly errors and model errors, overcome nonlinear factors, improve tracking accuracy and resist The effect of interference ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0127] The present embodiment carries out experimental verification to the Stewart stable platform control method based on RBF neural network of the present invention:
[0128] The parameters of the permanent magnet synchronous motor (PMSM) are shown in Table 1 below:
[0129] Table 1 Parameters of PMSM
[0130]
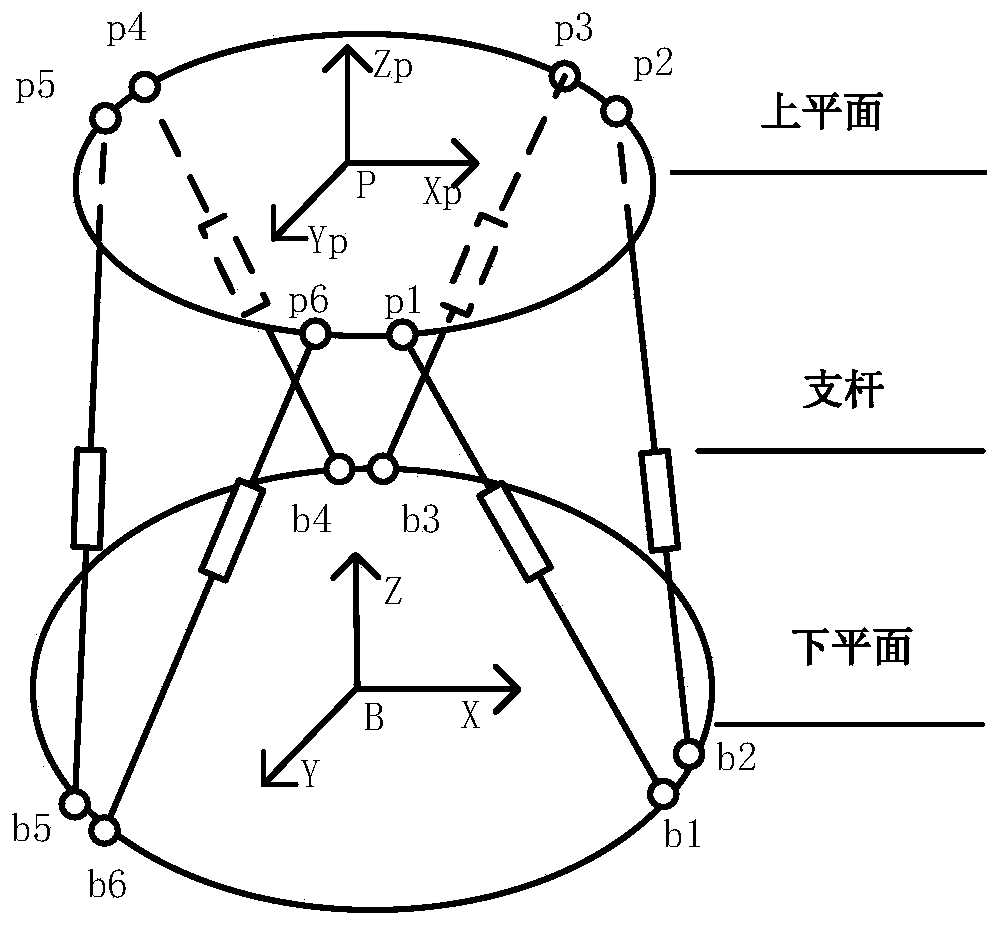
[0131] From the kinematic modeling process of the Stewart platform, it can be found that the main errors include: the installation deviation of the spherical joint of the moving platform ΔX Mi ,ΔY Mi ,ΔZ Mi , the installation deviation ΔX of the base spherical joint Fi ,ΔY Fi ,ΔZ Fi , and the initial zero position deviation ΔL of the drive shaft 0 i. There are 42 installation deviation items of the whole mechanism.
[0132] The installation deviation ΔB of the base ball joint used in this embodiment i =ΔX Fi ,ΔY Fi ,ΔZ Fi for:
[0133]
[0134] The installation deviation ΔP of the spherical joint of the moving platform i =ΔX Mi ,ΔY Mi ,ΔZ Mi fo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More