

Collision avoidance planning method for mobile robots based on deep reinforcement learning in dynamic environment
A mobile robot and dynamic environment technology, applied in the direction of instruments, non-electric variable control, two-dimensional position/channel control, etc., can solve the problems of inappropriate and large limitations in dynamic unknown environments, and achieve high adaptability and efficiency , Reduce the difficulty and improve the success rate of obstacle avoidance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The present invention will be further described below in conjunction with accompanying drawings and cases.
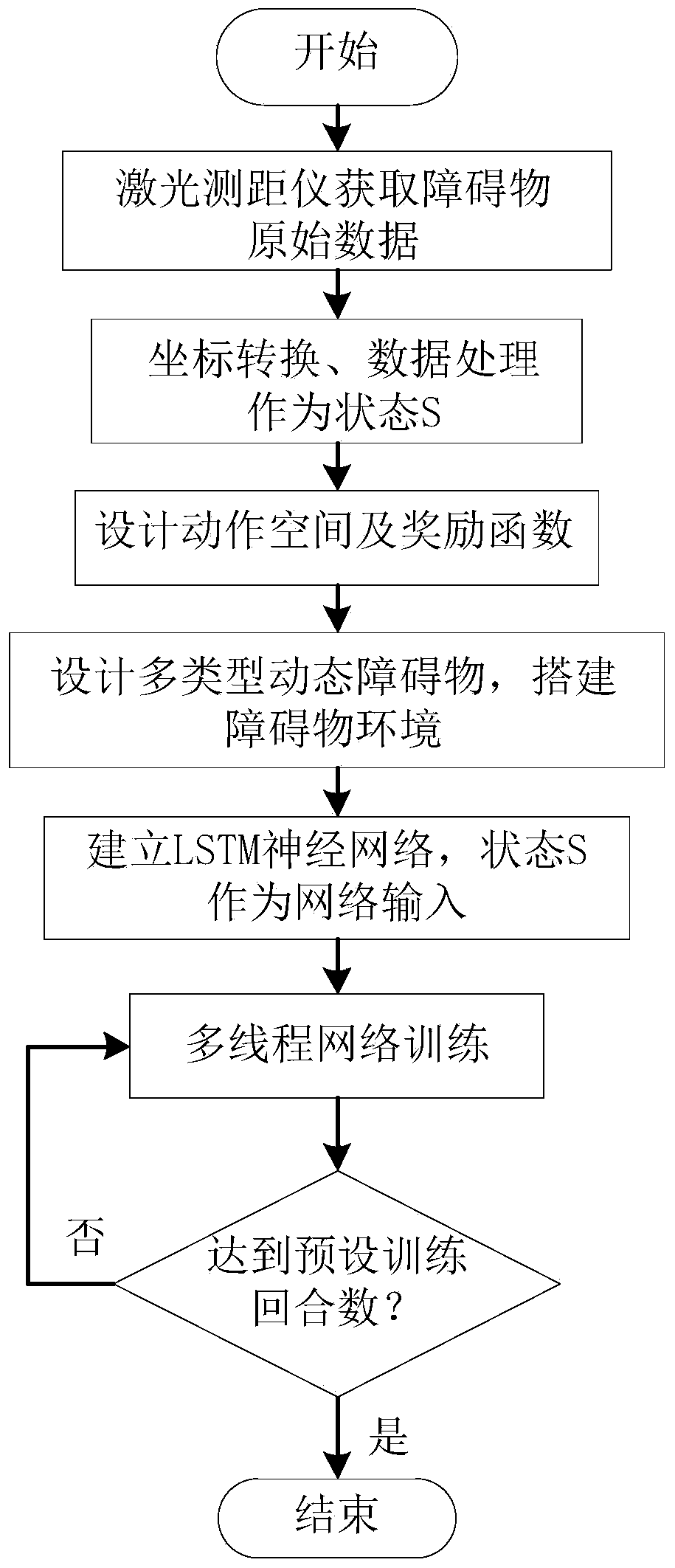
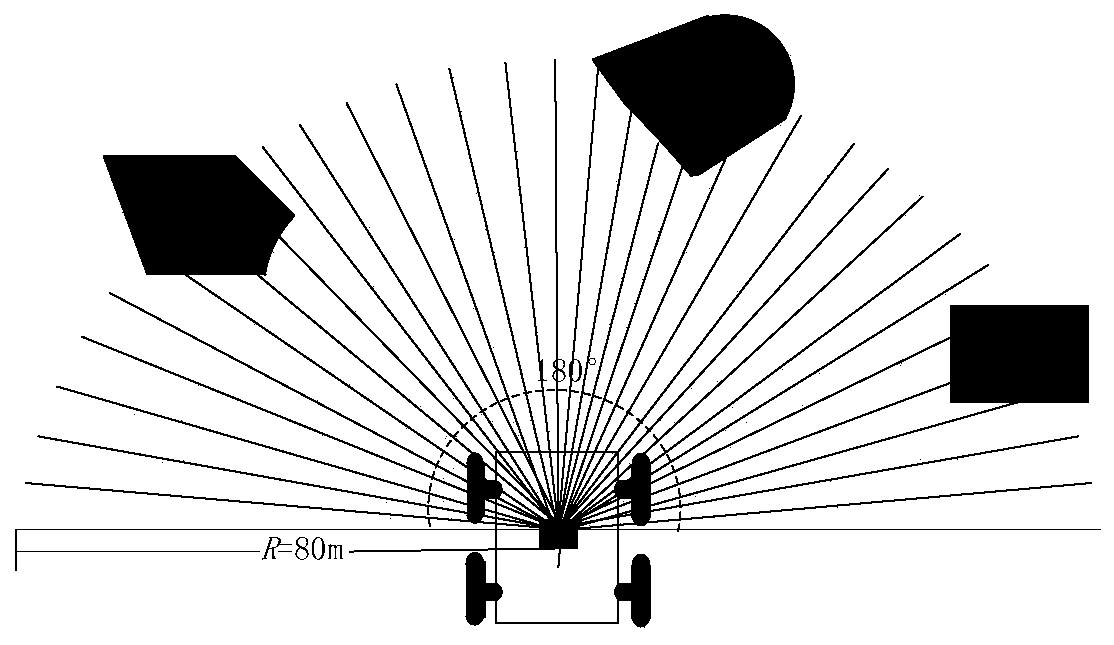
[0042] The invention discloses a mobile robot collision avoidance planning method based on deep reinforcement learning in a dynamic environment, belongs to the technical field of mobile robot navigation, and can be used for effective obstacle avoidance when a mobile robot works in a multi-type dynamic obstacle environment. The invention collects raw data through a laser rangefinder, processes the raw data as input to a neural network, and establishes an LSTM neural network. Through the A3C algorithm, the neural network outputs corresponding parameters, and obtains the action of each step of the robot after processing. The flow chart of the overall obstacle avoidance algorithm is as follows: figure 1 shown. The present invention does not need to model the environment, and is more suitable for environments with unknown obstacles. It adopts the actor-critic framewo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More