

A model-free adaptive inversion control method for knee exoskeleton angle
A model-free self-adaptive and inverse control technology, applied in adaptive control, general control systems, control/regulation systems, etc., can solve problems such as difficulties in implementing embedded computers, many constraints that cannot resist interference, etc., and achieve convenient computer programming, overcoming perturbations and uncertainties, theoretically strong effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
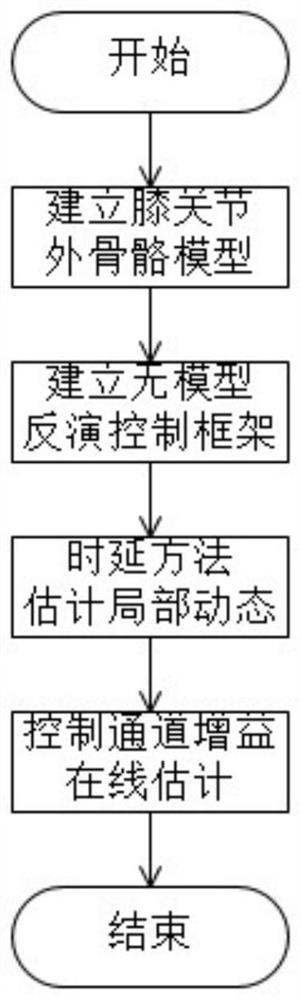
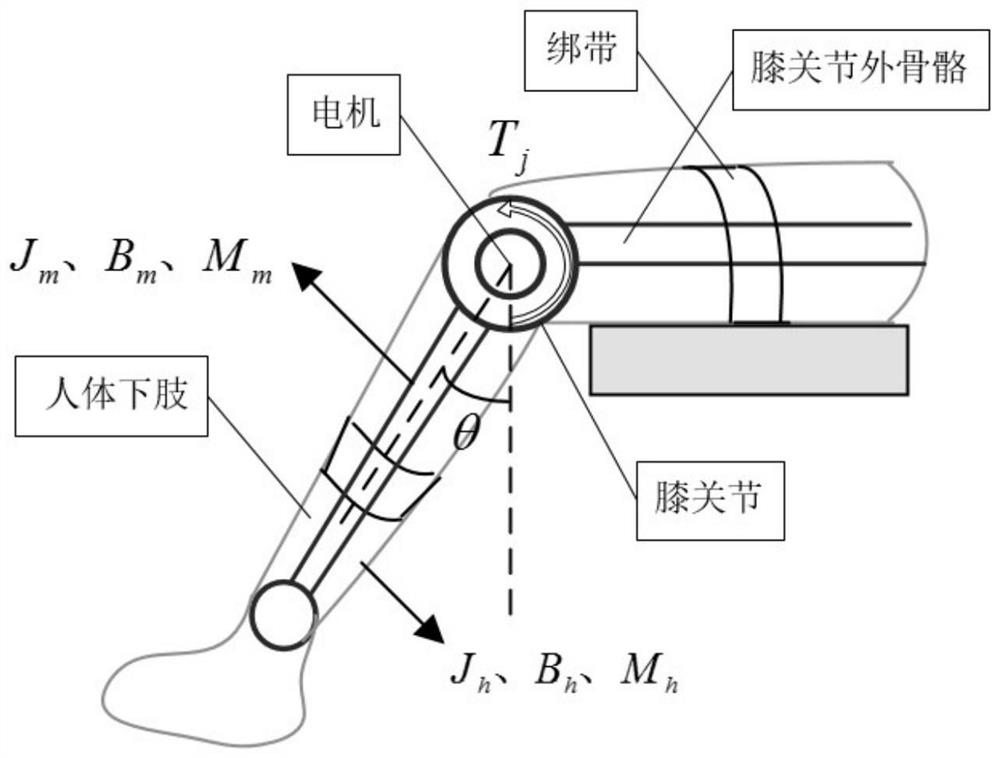
[0080] Step 1. Establish the impedance model of the knee exoskeleton robot in simulink. The knee joint exoskeleton is driven by a motor and adopts a brushless DC motor. The motor is installed on the outside of the knee joint, and the human-machine synchronous link is adopted, that is, the movement and force of the human body are consistent with the exoskeleton. The thigh and calf exoskeleton of the knee joint is made of aluminum alloy, which can be stretched and weighed about 5kg.
[0081] Step 1.1. Establish the impedance model of the knee exoskeleton:
[0082]
[0083] Among them, J o is the moment of inertia of the knee exoskeleton; θ j is the motion angle of the human knee joint; B o is the damping coefficient of the knee exoskeleton; T j is the torque of the knee exoskeleton, provided by the motor; G o (θ j ) is the gravity expression of the knee exoskeleton, specifically M o gl o sinθ j ; where M o is the weight of the knee exoskeleton; g is the accelerati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More