System for autonomously limiting, recovering and releasing marine navigation device
A technology of aircraft and ocean, which is applied in the system field of self-limiting and retracting marine aircraft, can solve the problems of personnel injury equipment, high use and maintenance costs, and high risk, so as to improve operating efficiency, reduce economic costs, Highly intelligent effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
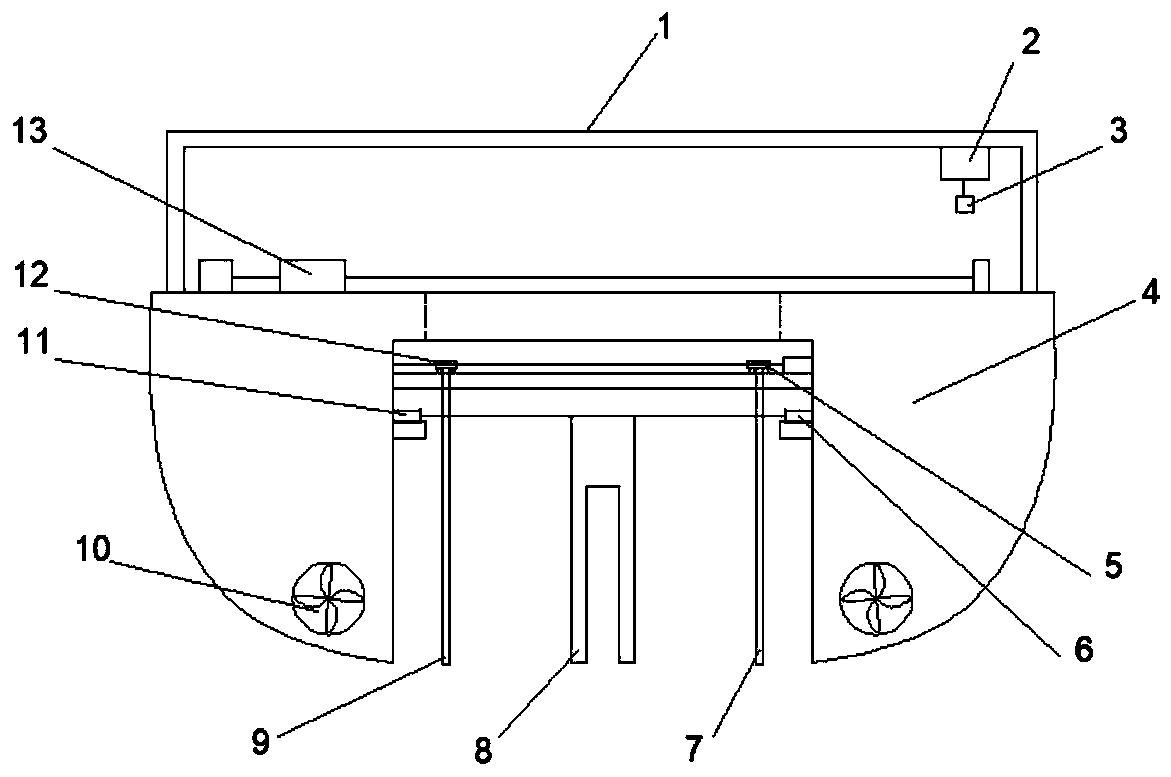
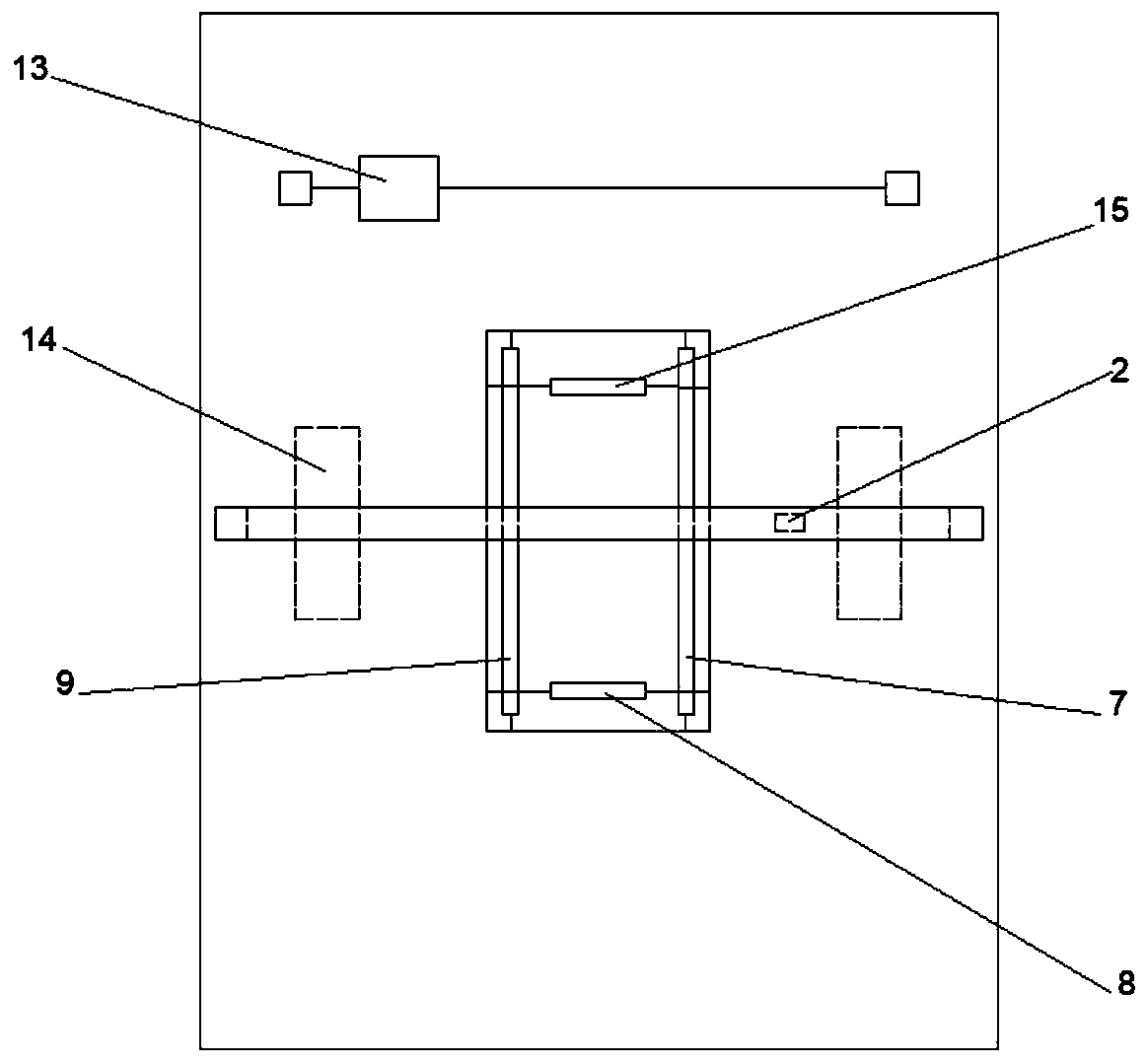
[0017] Such as Figure 1-2 As shown, including: 1. Crane beam, 2. Bridge car B, 3. Electromagnetic lifting head, 4. Catamaran platform, 5. Starboard side fixed claw sliding trolley, 6. Tail fixed claw rotating device, 7. Starboard side Fixed claw, 8. Tail fixed claw, 9. Port side fixed claw, 10. Differential propeller, 11. Tail fixed claw rotating device, 12. Port side fixed claw sliding trolley, 13. Anti-roll slider, 14. Watertight Compartment, 15. Bow fixing claws.
[0018] The invention belongs to the field of marine unmanned vehicles, and in particular relates to a system for autonomously limiting and retracting marine vehicles. The purpose of the invention is to provide a system for autonomously limiting and retracting the marine craft with simple operation, high intelligence and good reliability.
[0019] For realizing the pu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



