Exoskeleton mechanical auxiliary hand
A technology of mechanical assistance and exoskeleton, which is applied in the field of manipulator devices and exoskeleton mechanical assistance hands, can solve the problems of unable to meet the daily auxiliary training of patients with impaired hand function, is not easy to carry, and has a complicated structure, and achieves simple structure and anti-shake And the effect of fast response and high intelligence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] Embodiments of the present invention will now be described with reference to the drawings, in which like reference numerals represent like elements.
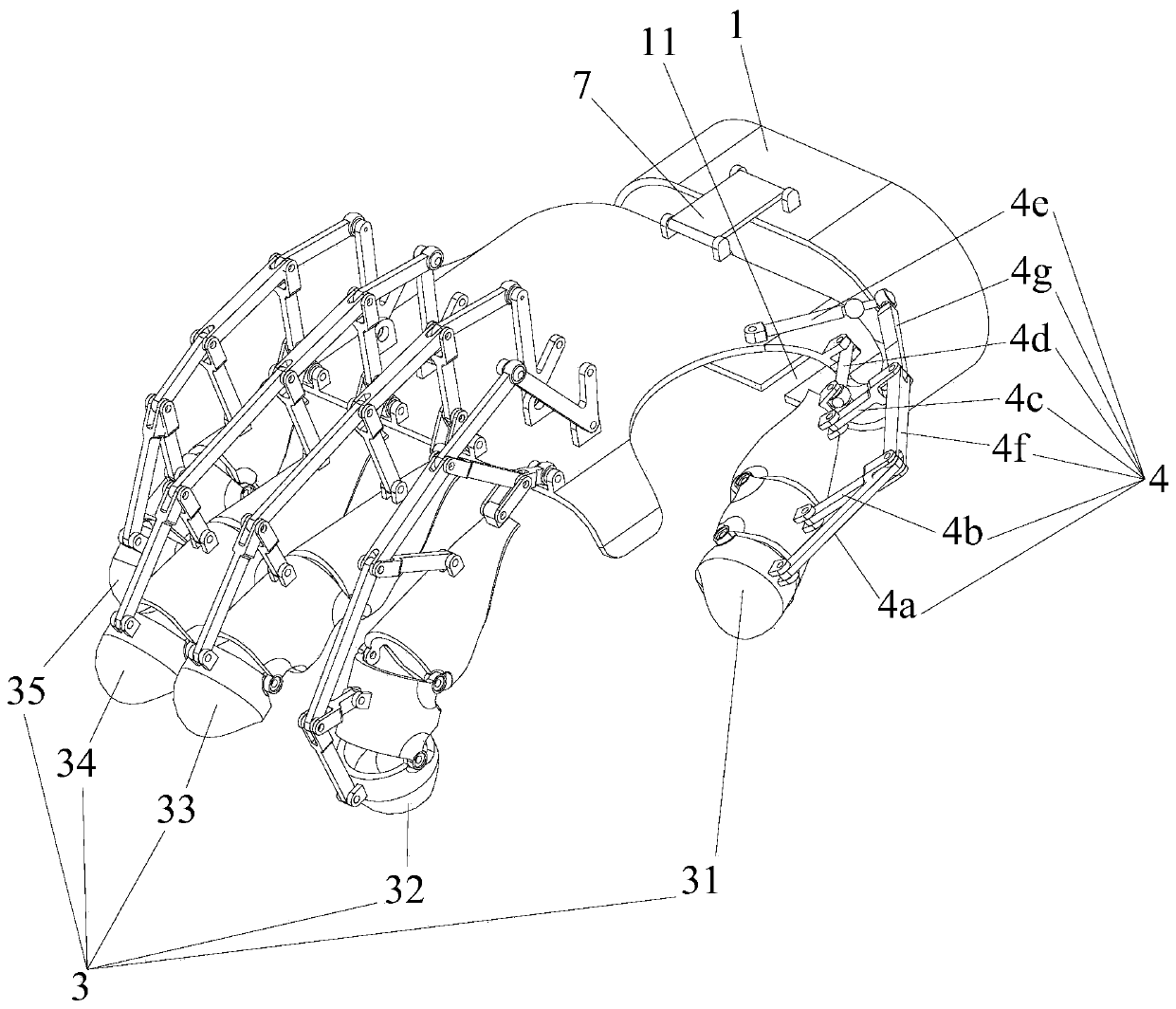
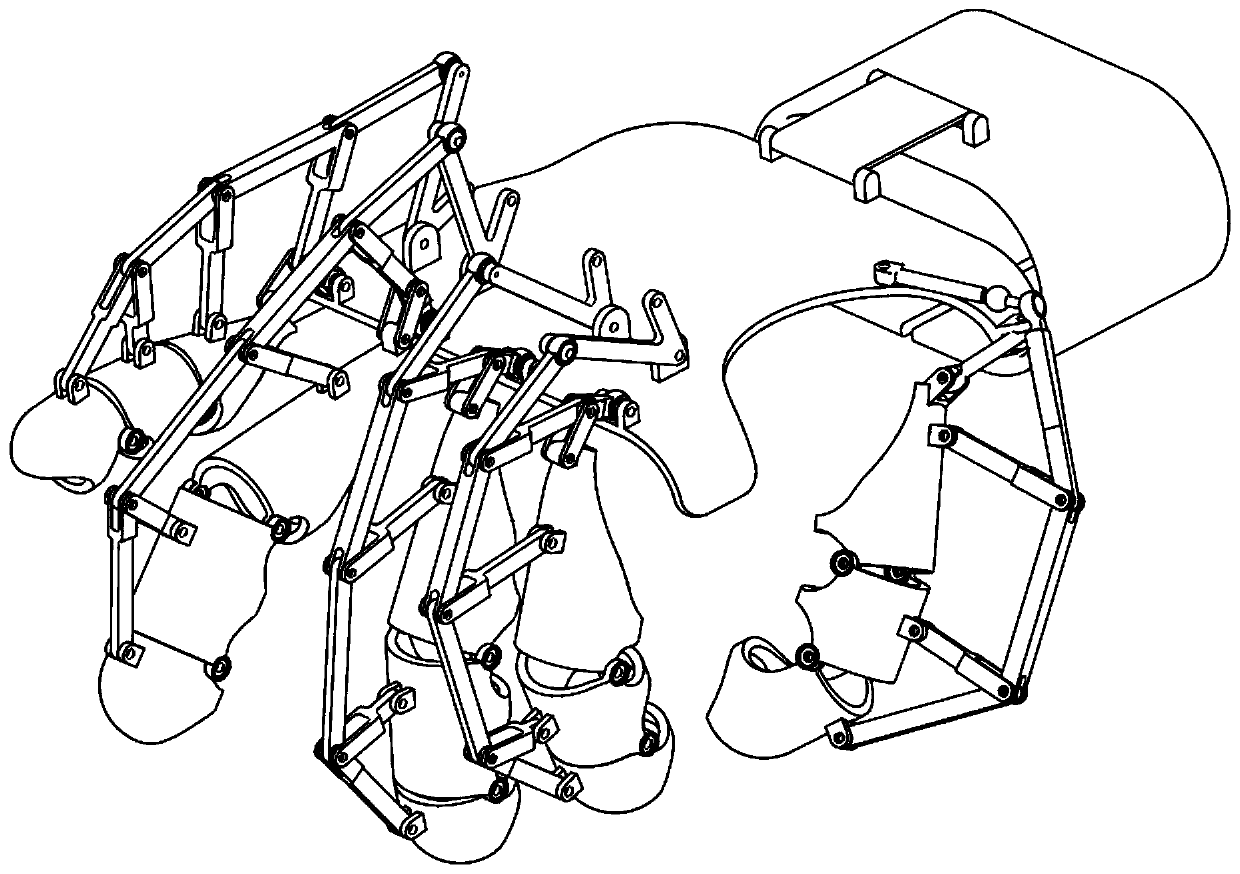
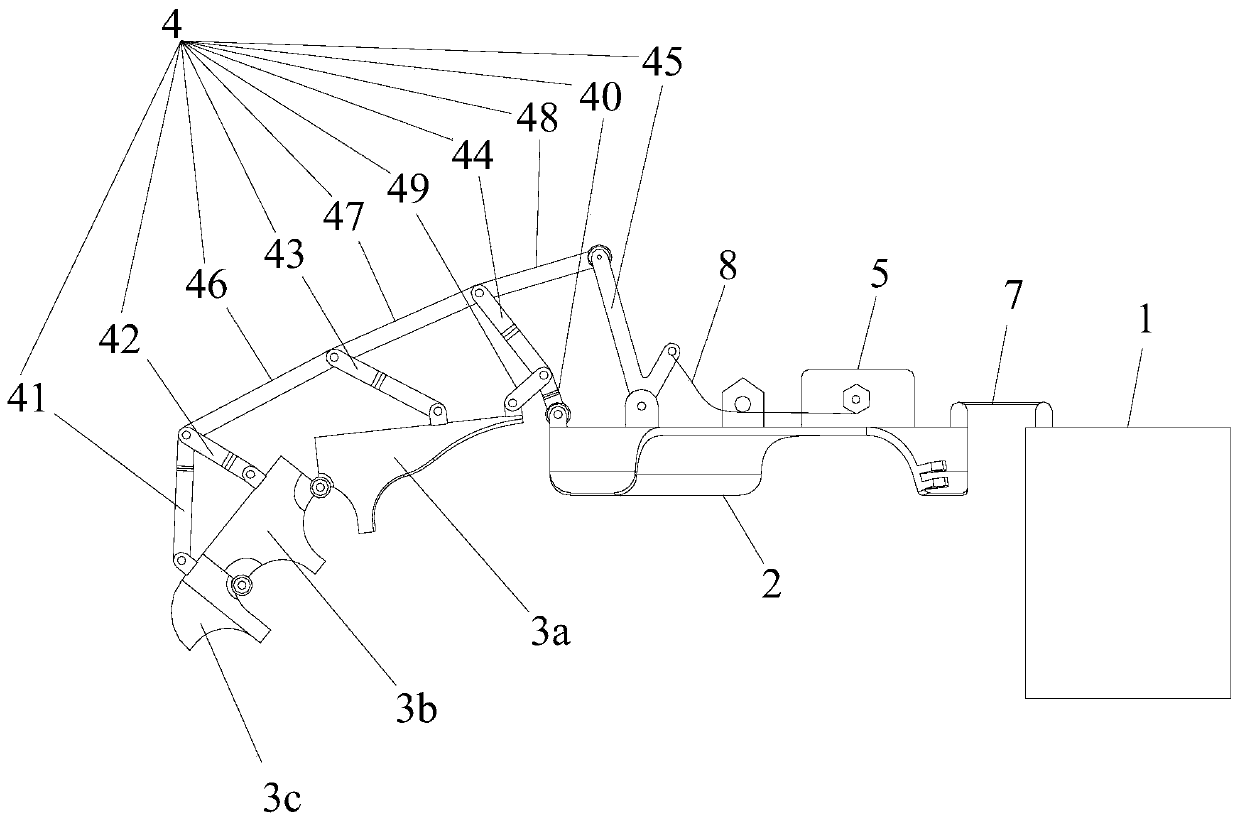
[0032] Please refer to Figure 1-6 , the exoskeleton mechanical auxiliary hand includes a mechanical structure part and a power part, and the mechanical structure part includes a plastic wrist cover 1, a palm profiling plastic shell 2 and a finger joint plastic finger cot 3 set according to the complete palm profiling , and the interlocking structure 4 that is contained in the profiling plastic shell 2 of the palm and the backside of the finger joint plastic finger cover 3, the plastic wrist cover 1 is connected with the profiling plastic shell 2 of the palm. The power part includes a steering gear 5 and a pressure sensor 6. The steering gear 5 is installed on the back of the palm profiling plastic shell 2 and connected to the interlocking structure 4 through a pulling member. The pressure sensor 6 is installed on the fin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More