

Indoor robot motion estimation method based on deep learning and visual inertia fusion
A technology of robot motion and deep learning, applied in the field of motion estimation, can solve the problem of low accuracy, and achieve the effect of improving robustness, reducing the influence of positioning accuracy, and high positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with specific examples.
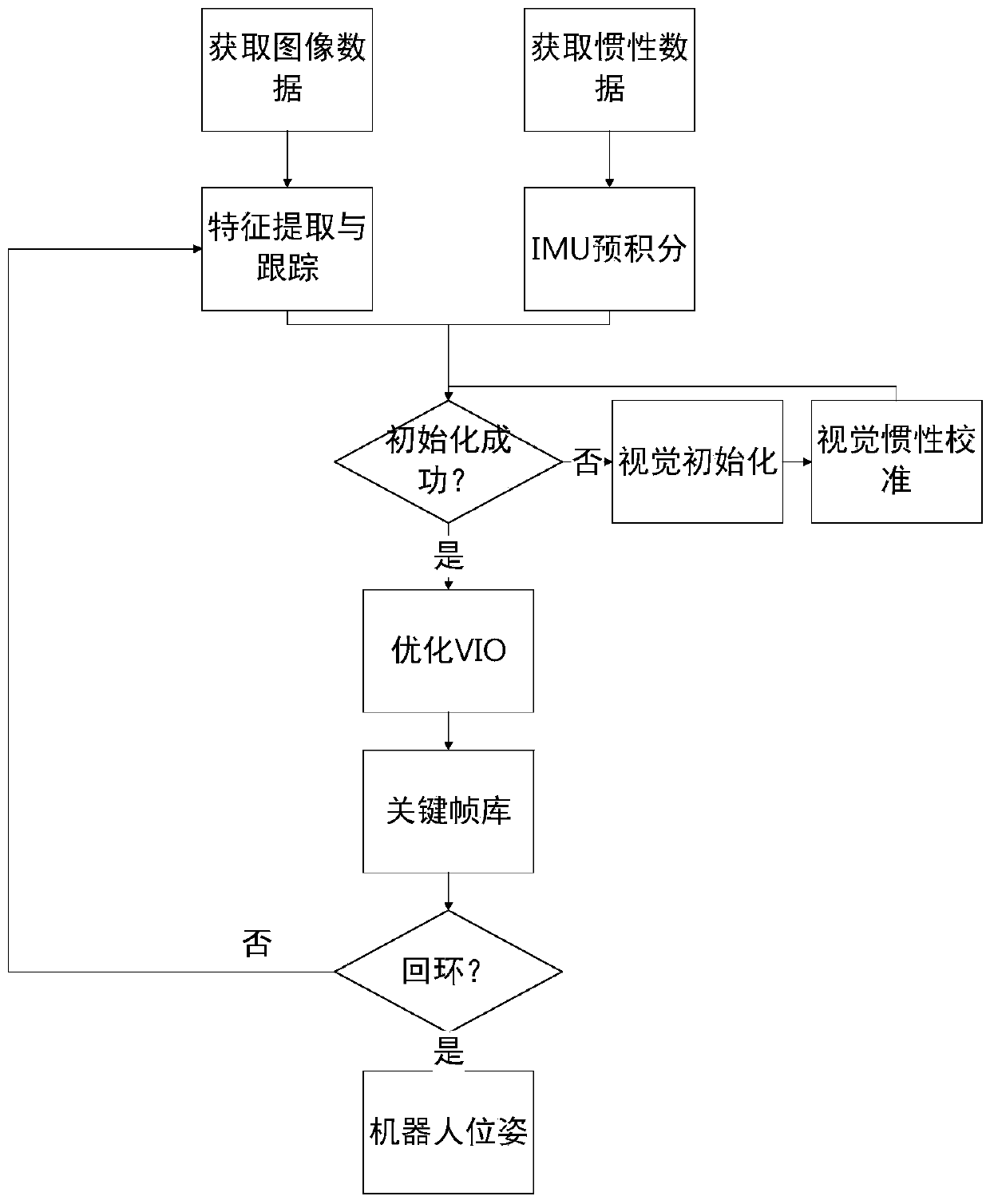
[0026] An indoor robot motion estimation method based on deep learning and visual-inertial fusion, such as figure 1 As shown, its specific steps are as follows:
[0027] Step 1. Use the monocular camera to acquire the visual data (ie visual image) of the robot.
[0028] Step 2, using the 3D projection geometry training model to extract and track the features of the visual image, and select key frames at the same time.
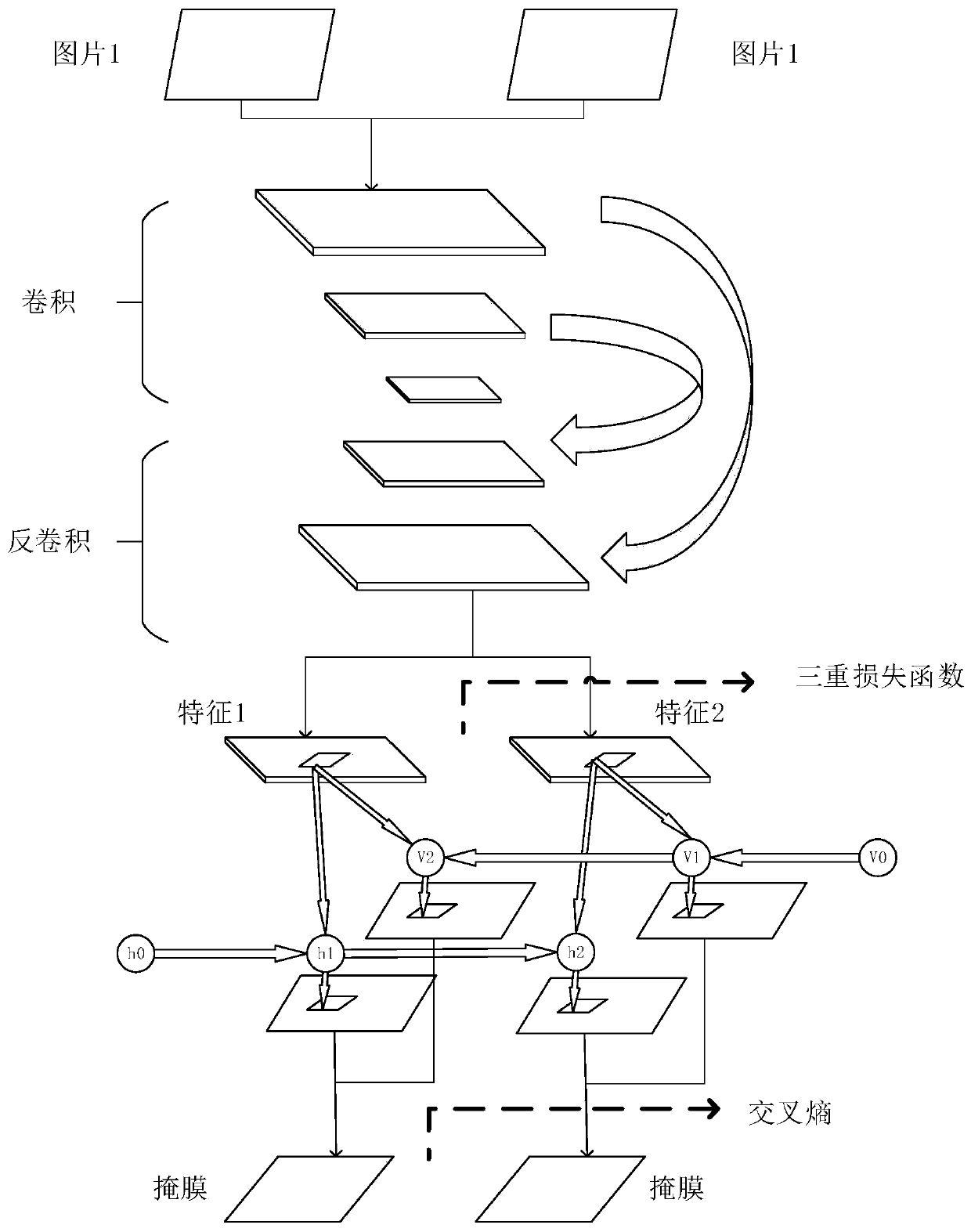
[0029] (1) Use CNN and LSTM to form a deep learning network, that is, the 3D projection geometry training model, which is a 3D projection geometry training network for generating key points and descriptors.
[0030] 3D projective geometry training models such as figure 2 As shown, the upper part is a CNN (Convolutional Neural Network), which is a 50-la...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More