

Route planning and scheduling system and method for multiple robots
A dispatching system and path planning technology, applied in control/adjustment system, vehicle position/route/height control, instruments, etc., can solve problems such as difficult to choose a reasonable walking path, failure to avoid obstacles, etc., to facilitate later maintenance and increase speed , the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
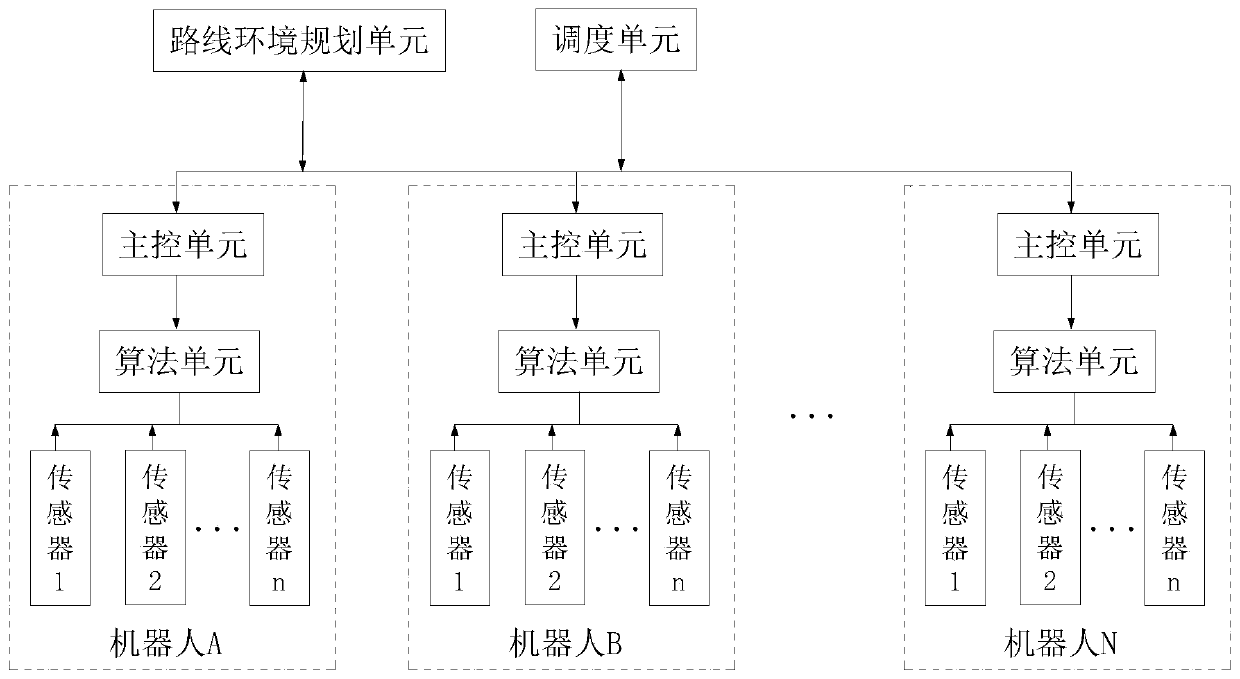
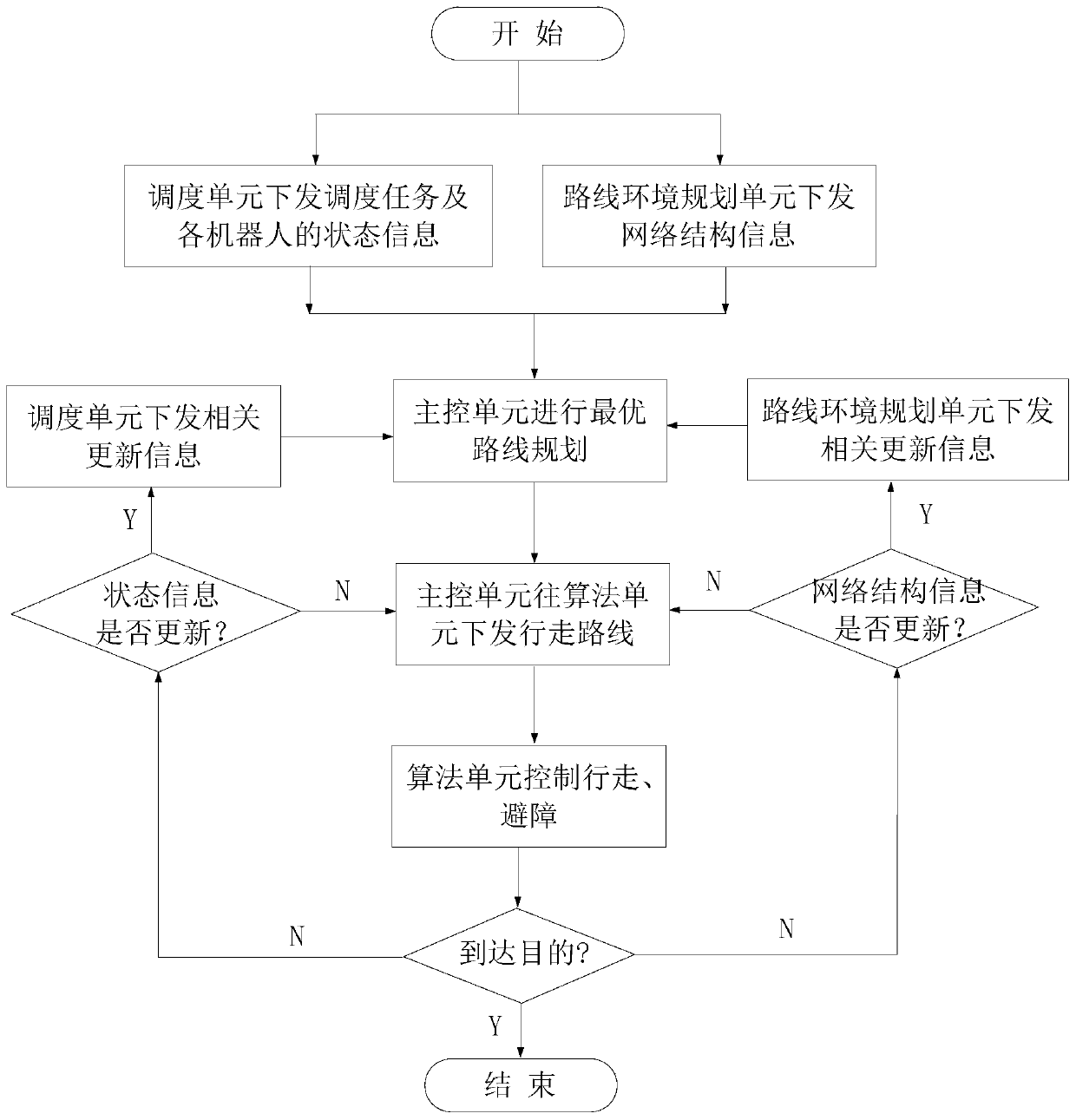
[0048] A path planning and scheduling system for multiple robots, such as figure 1 As shown, it includes a plurality of robots, as well as a route environment planning unit and a scheduling unit, and each robot is provided with a main control unit and an algorithm unit.
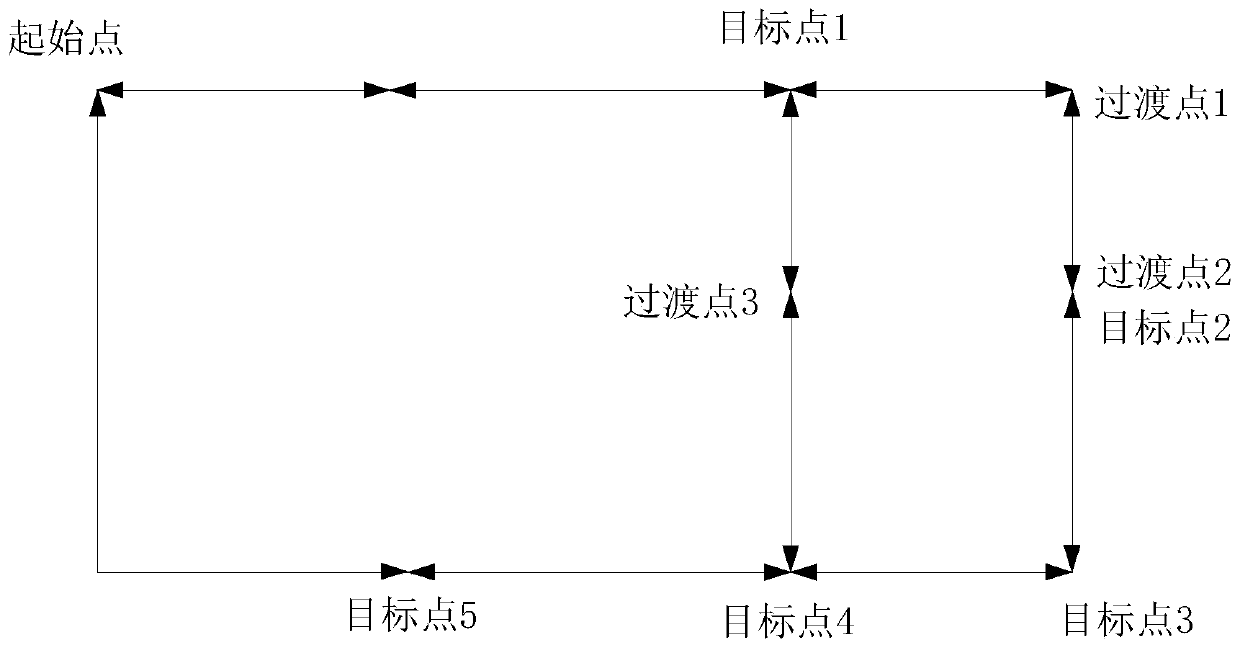
[0049] The route environment planning unit is used to plan all driving routes according to the working environment, and through the starting point, target point and transition point on each route, the route is segmented and fragmented into several road sections, and each road section is connected to form a network structure, and Determine the road condition information of each road section (including information such as the length of each road section, walking time, walking complexity, and the number of obstacles on each road section), and combine the network structure information (including network structure and road condition information, the network structure mainly refers to each section. The connection r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More