Autonomous robot charging docking control method and device, and computer-readable storage medium
A charging equipment and autonomous charging technology, applied in non-electric variable control, control/regulation system, two-dimensional position/channel control and other directions, which can solve the problem of many docking angle deviations, docking angle deviation, and the inability of robots to efficiently complete autonomous docking. Charging action, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
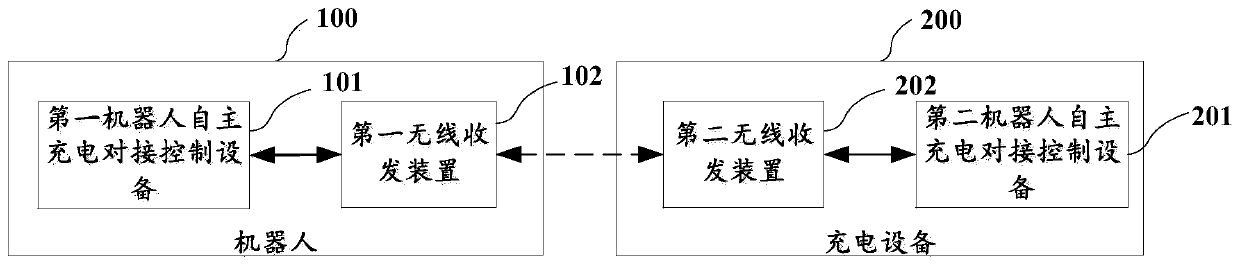
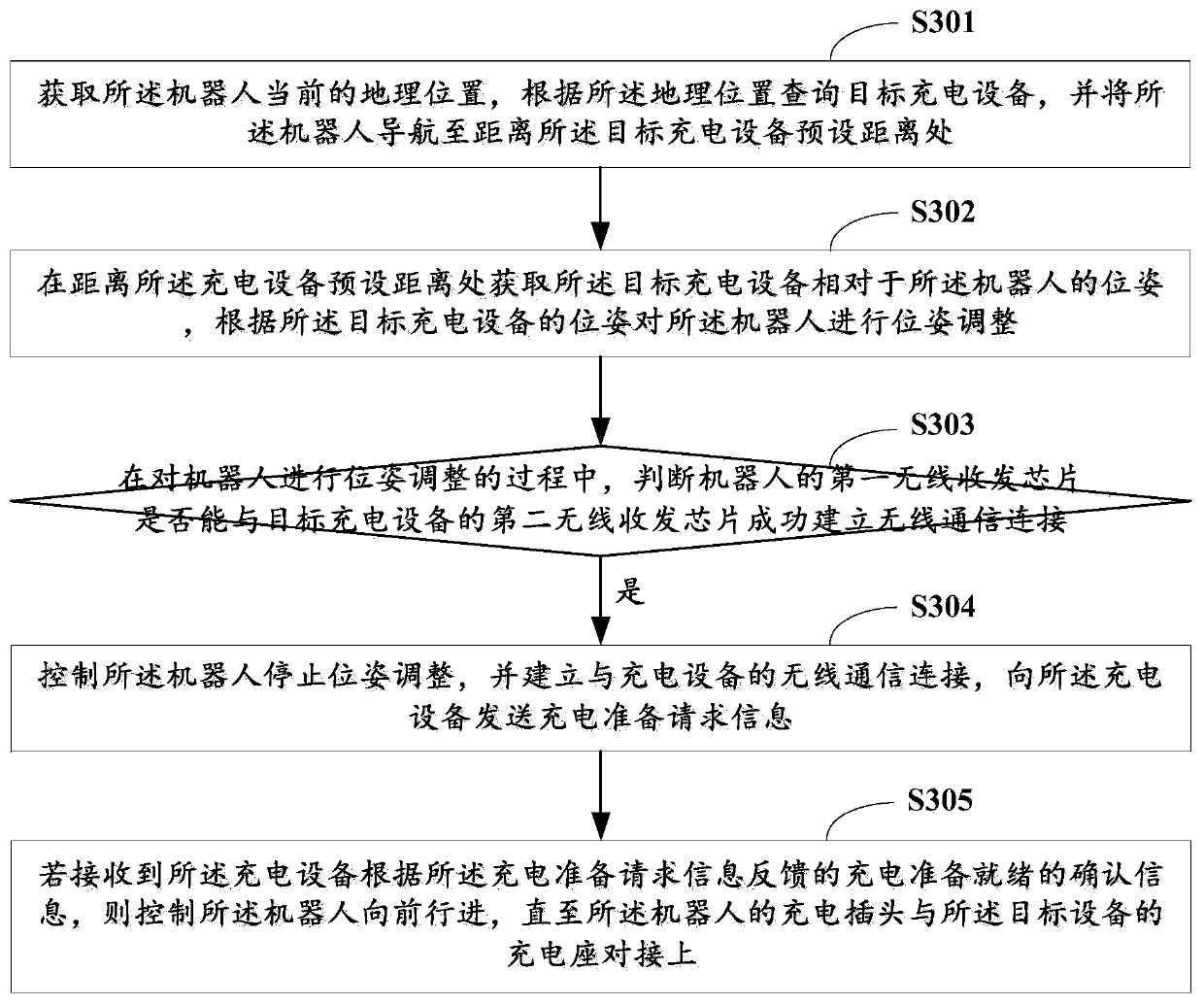
[0071] image 3 It is a schematic flow chart of the specific implementation of the robot autonomous charging and docking control method provided in Embodiment 1 of the present invention. The execution body of this method is figure 1 The first shown robot autonomously charges the docking control device 101 . see image 3 As shown, the robot autonomous charging and docking control method provided in this embodiment may include the following steps:
[0072] Step S301 , acquiring the current geographic location of the robot 100 , querying the target charging device 200 according to the geographic location, and navigating the robot 100 to a preset distance from the target charging device 200 .
[0073] In this embodiment, the robot 100 itself is provided with a positioning device, and the autonomous charging and docking control device of the robot obtains the current geographic location information of the robot 100 through the positioning device, and can Query all charging devi...
Embodiment 2
[0099] Figure 4 It is a schematic flow chart of the specific implementation of the robot autonomous charging and docking control method provided in the second embodiment of the present invention. The execution body of this method is figure 1 The first shown robot autonomously charges the docking control device 101 . Compared with the previous embodiment, in this embodiment, the robot 100 is provided with an elastic device, and the end of the target charging device 200 is provided with a free end fastening device for fixing to the elastic device; see Figure 4 As shown, the robot autonomous charging and docking control method provided in this embodiment may include the following steps:
[0100] Step S401, obtaining the current geographic location of the robot 100, querying the target charging device 200 according to the geographic location, and navigating the robot 100 to a preset distance from the target charging device 200;
[0101] Step S402, acquiring the pose of the ta...
Embodiment 3
[0114] Figure 5 It is a schematic flow chart of the specific implementation of the robot autonomous charging and docking control method provided in the third embodiment of the present invention. The execution body of this method is figure 1 The first shown robot autonomously charges the docking control device 101 . Compared with Embodiment 1, in this embodiment, the target charging device 200 is provided with an elastic device, and the robot 100 is provided with a fastening device that cooperates with the elastic device; see Figure 5 As shown, the robot autonomous charging and docking control method provided in this embodiment may include the following steps:
[0115] Step S501, obtaining the current geographic location of the robot 100, querying the target charging device 200 according to the geographic location, and navigating the robot 100 to a preset distance from the target charging device 200;
[0116] Step S502, acquiring the pose of the target charging device 200 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More