Double linear motor energy-feeding active suspension actuator and control method thereof
A technology of active suspension and linear motor, applied in the field of vehicle dynamics, can solve problems such as failure-prone, thrust cannot complete the active force of the suspension, etc., to achieve the effect of ensuring work stability, enhancing adaptive performance, and good fault tolerance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
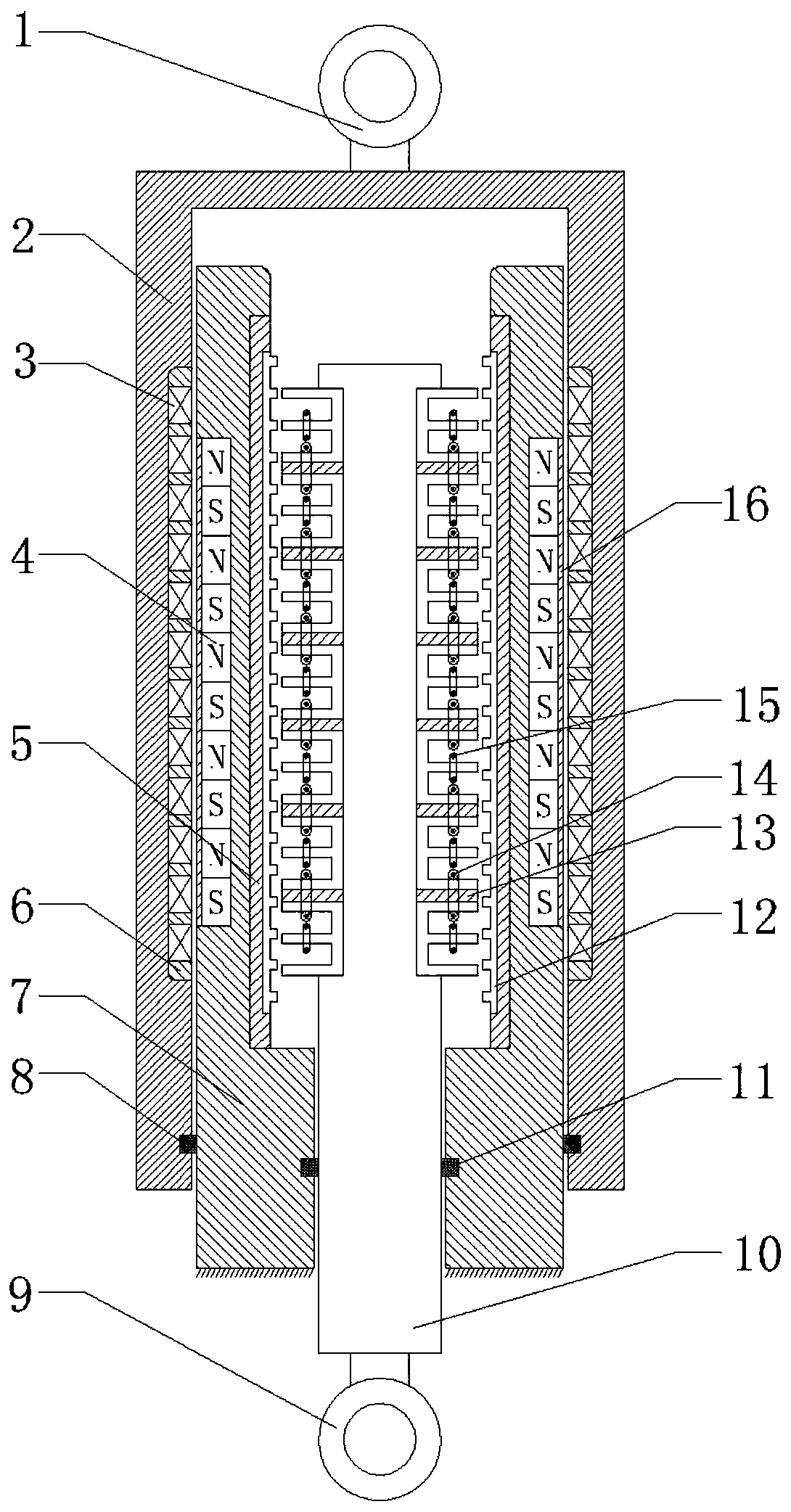
[0034] Such as figure 1 As shown, a dual linear motor fed active suspension actuator includes an actuator body and a control system, and is characterized in that the actuator body includes an actuator outer shell (2), a base ( 7), rod (10), six-phase flux-linkage linear motor and three-phase permanent magnet synchronous linear motor;
[0035]The three-phase permanent magnet synchronous linear motor comprises a primary permanent magnet (3) of the three-phase permanent magnet synchronous linear motor, a secondary permanent magnet (4) of the three-phase permanent magnet synchronous linear motor, a magnetic isolation material (6), and a secondary protective layer (16), the primary permanent magnet (3) of the three-phase permanent magnet synchronous linear motor is inlaid and installed in the outer casing (2) of the actuator, and the upper and lower ends of the primary permanent magnet (3) of the three-phase permanent magnet synchronous linear motor Magnetic isolation materials (6...
Embodiment 2
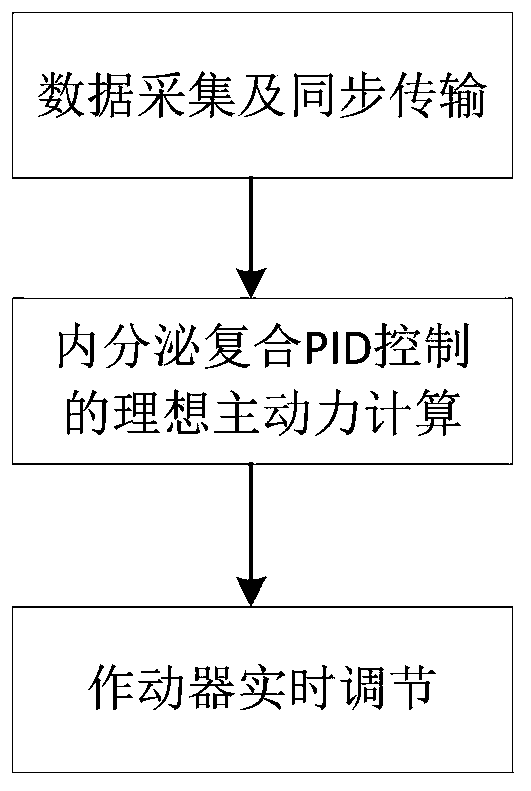
[0046] Such as image 3 As shown, a control method of a double linear motor feed type active suspension actuator, the method includes the following steps:
[0047] 1. Data collection and transmission;
[0048] 2. Calculation of the ideal active force under the control of endocrine compound PID;
[0049] 3. Real-time adjustment of the actuator.
[0050] Such as Figure 4 As shown, the calculation steps of the ideal active force under the control of the endocrine complex PID are as follows:
[0051] Step 1: The sprung mass acceleration sensor collects the sprung mass acceleration in real time According to the PID control strategy Get the preliminary ideal control force F i-1 , where e(t) is the measured value of sprung mass acceleration Difference from 0; K p is the proportional gain link coefficient, K i is the integral gain link coefficient, K d is the differential gain link coefficient;
[0052] Step 2: Calculate the endocrine control link according to the preli...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More