

Exoskeleton robot for upper limb rehabilitation training
An exoskeleton robot and rehabilitation training technology, applied in the field of robotics, can solve the problems of insignificant torque drive effect, low loading efficiency, avoidance of difficult space intersections, etc., and achieve the goal of increasing the internal space of the torso, improving loading efficiency, and reducing mass Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the embodiments described below are some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
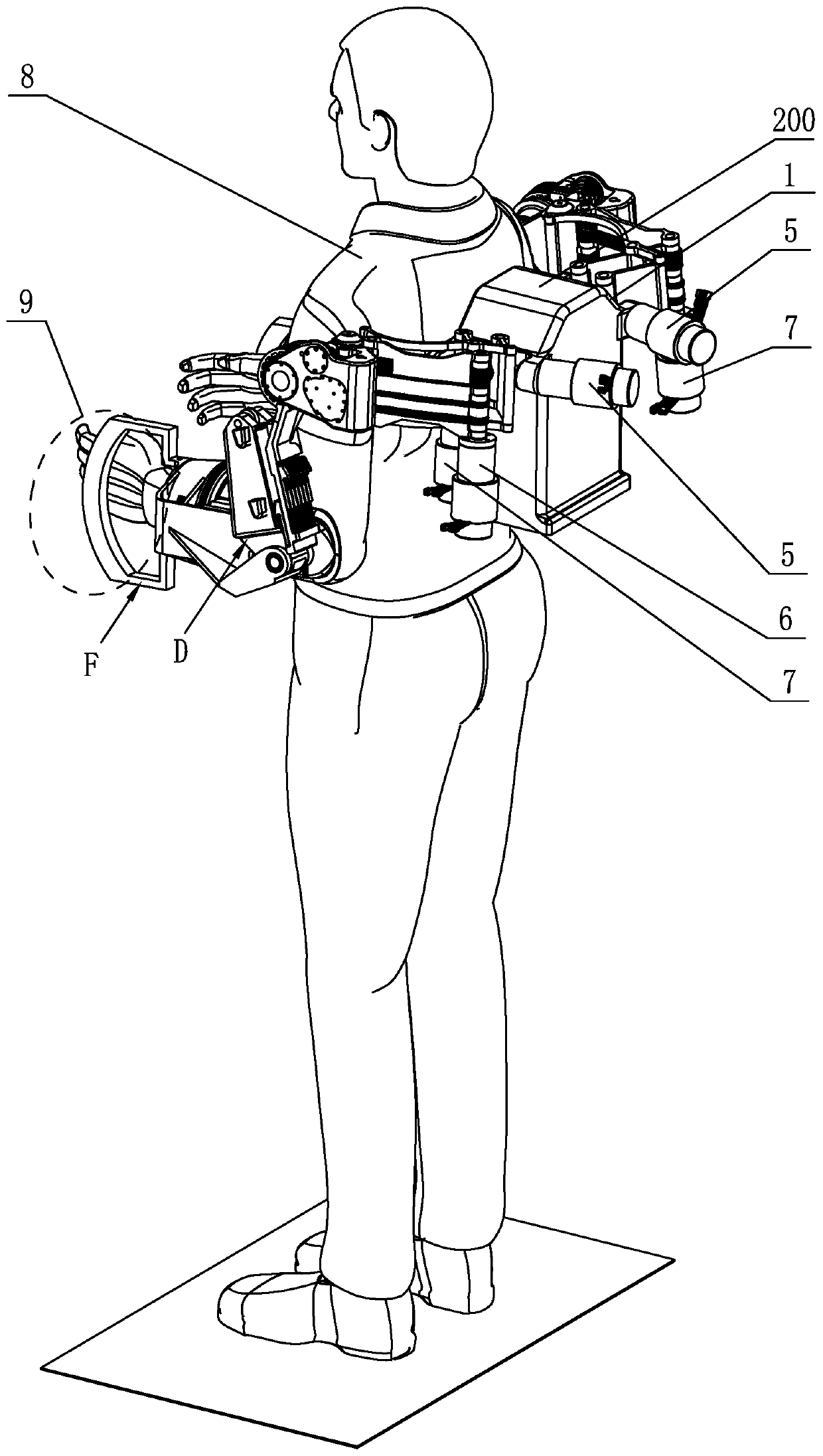
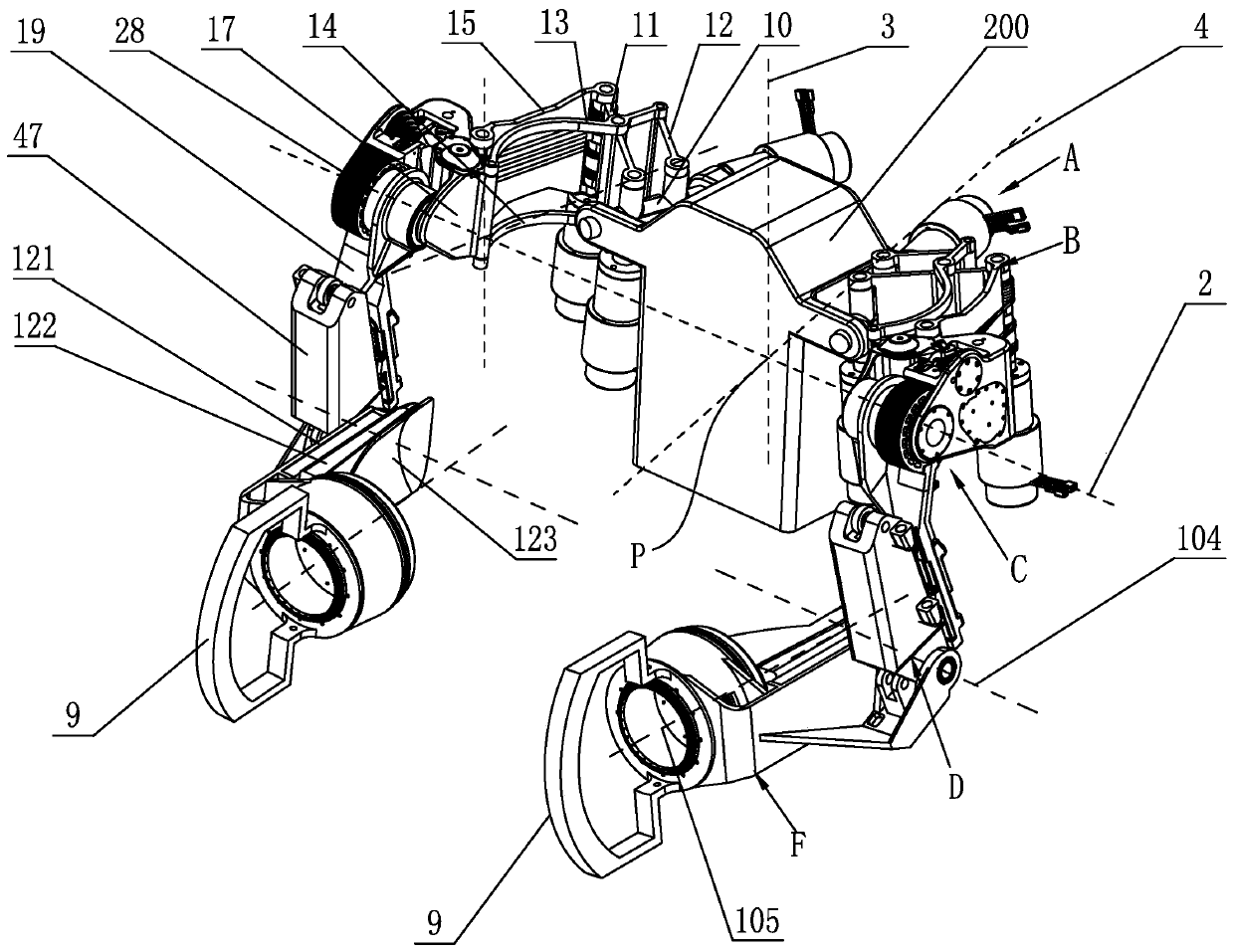
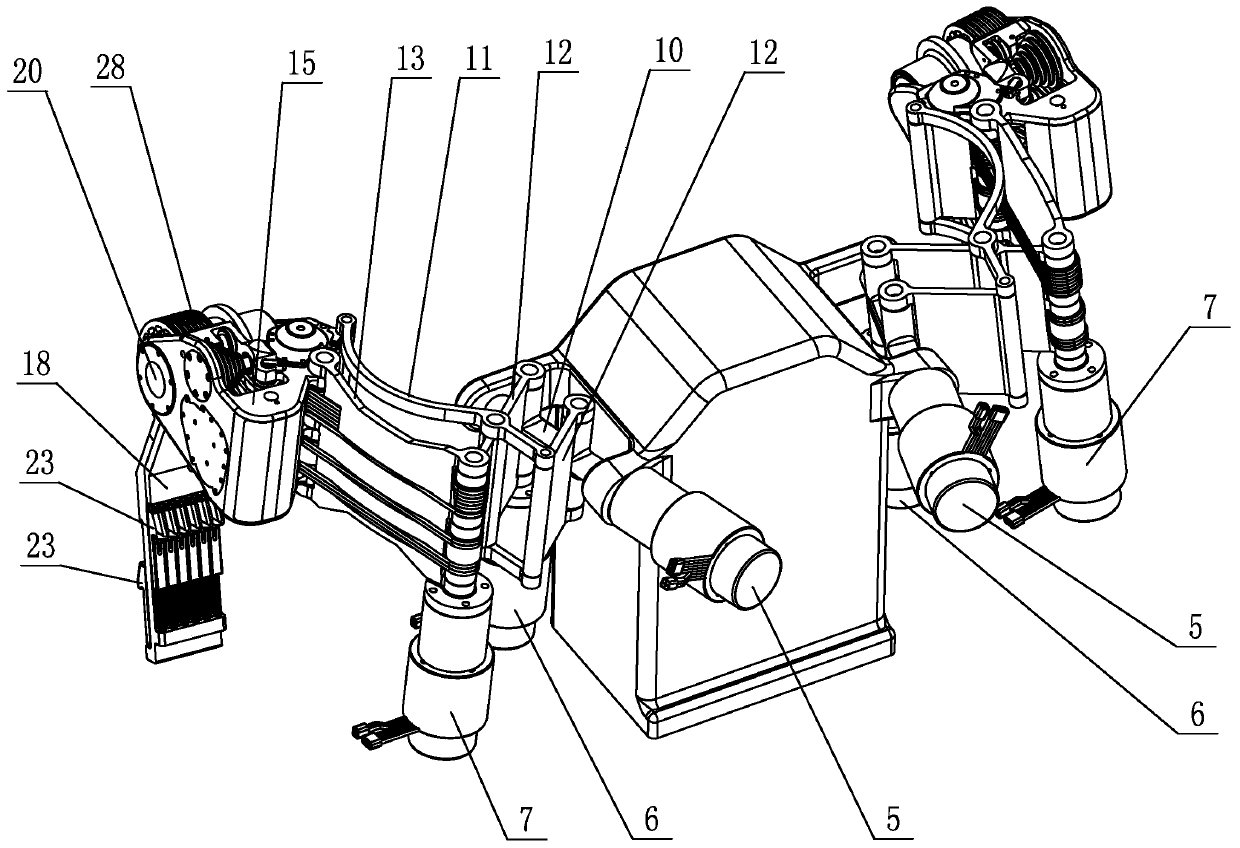
[0031] see Figure 1-Figure 4 As shown, an exoskeleton robot for upper limb rehabilitation training includes a base 1, two shoulder joints, two elbow joints and two wrist joints; a shoulder joint, an elbow joint D and a mirror image are arranged on both sides of the base 1 A wrist joint F; the shoulder joint is installed on the base 1, the elbow joint D is installed on the shoulder joint, and the wrist joint F is installed on the elbow joint D;
[0032] Each...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More