

Automatic control method and automatic control system for direct-current micromouse
A technology of computer mouse and controller, which is applied in general control system, control/adjustment system, adaptive control, etc., and can solve problems such as slow response speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
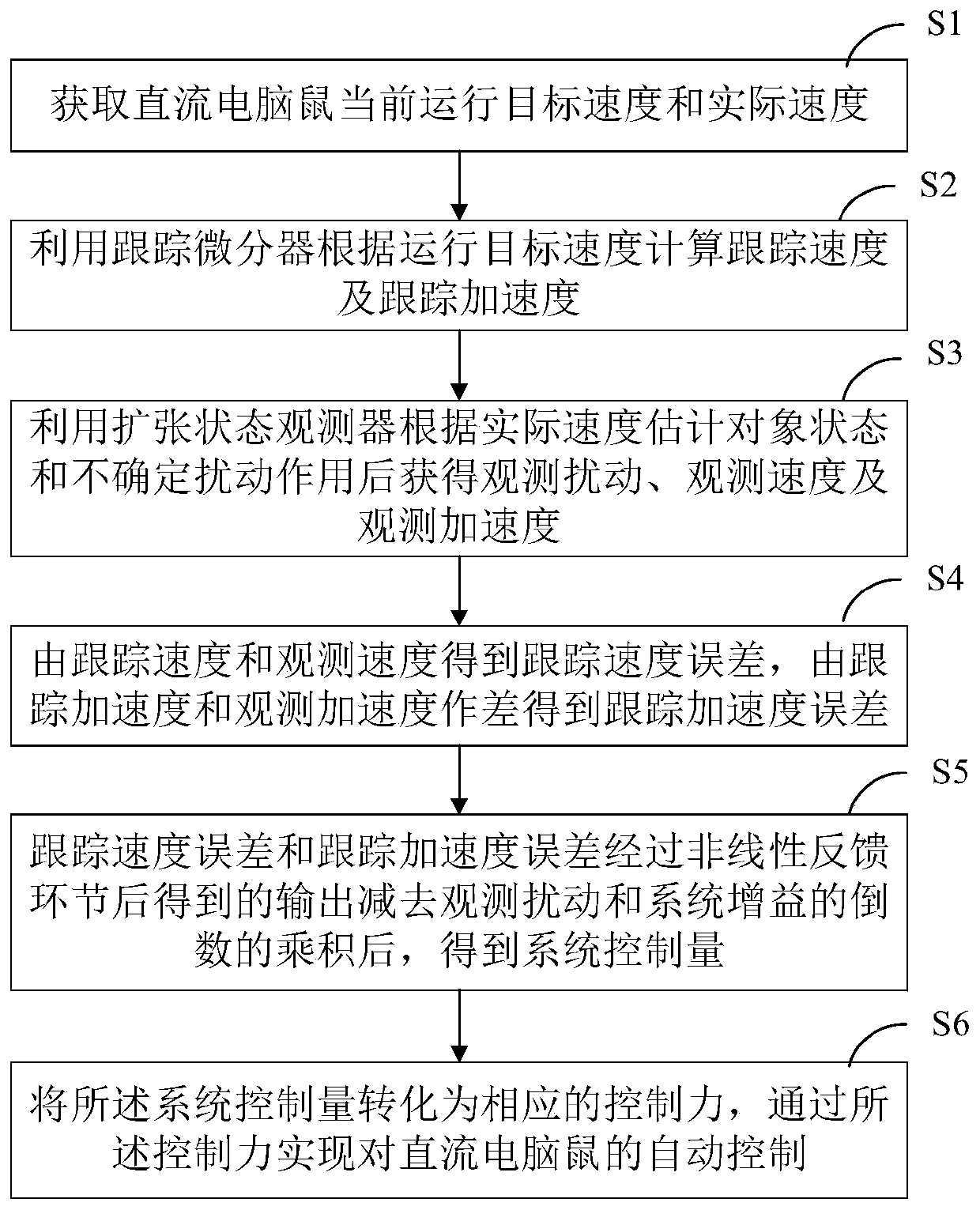
[0071] This embodiment provides an automatic control method for a DC computer mouse, figure 1 Shown is a schematic flow chart of the automatic control method of the DC computer mouse. Such as figure 1 Shown, described DC computer mouse automatic control method comprises the steps:
[0072] Step S1, obtaining the current running target speed and actual speed of the DC computer mouse.
[0073] Step S2, using the tracking differentiator to calculate the tracking speed and tracking acceleration according to the running target speed.
[0074] Step S3, using the extended state observer to estimate the state of the object and the action of the uncertain disturbance according to the actual velocity, and then obtain the observed disturbance, observed velocity and observed acceleration.
[0075] In step S4, the tracking speed error is obtained from the difference between the tracking speed and the observed speed, and the tracking acceleration error is obtained from the difference bet...
no. 2 example
[0125] This embodiment provides a DC computer mouse automatic control system, Figure 5 Shown is a schematic structural diagram of the DC computer mouse automatic control system. Such as Figure 5 As shown, the DC computer mouse automatic control system includes: a target speed calculation module 1, an infrared sensor 2, an actual DC computer mouse model module 3, and an ADRC controller 4.
[0126] Wherein, the target speed calculation module 1 is used to obtain the running target speed and actual speed of the DC computer mouse. Infrared sensor 2 is used to detect the state of obstacles around the DC computer mouse, roughly judge the distance, and transmit the detected information back to the ADRC controller. The actual DC computer mouse model module 3 is used to input the mathematical model of the controlled DC computer mouse. The ADRC controller 4 is used to obtain the output of the control quantity of the actual DC computer mouse model 3 on the basis of the data of the t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More