

A multi-sensor decision-level fusion method for intelligent ship surface target perception and recognition
A decision-level fusion and surface target technology is applied in the field of multi-sensor decision-level fusion of intelligent ship surface target perception and recognition. It can solve the problems of lack of mature methods, failure of detection and tracking, and difficult completion of target unification, and achieve high robustness. Accurate environmental perception and obstacle detection and recognition, improving the effect of robustness and smoothness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be further described below with reference to the examples. The following examples are illustrative, not restrictive, and the protection scope of the present invention cannot be limited by the following examples.
[0030] The technical scheme adopted by the present invention is:
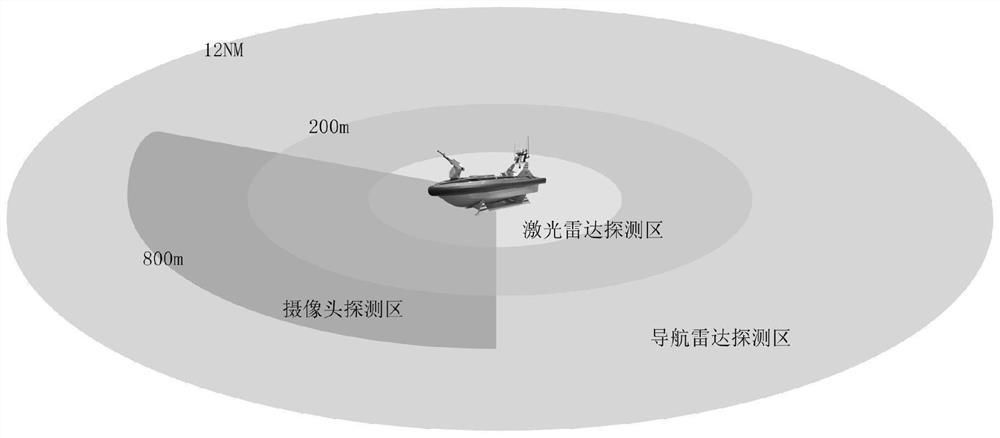
[0031] A multi-sensor decision-level fusion intelligent ship surface target perception and identification method, the innovation of the present invention lies in, such as figure 2 As shown in the figure, each sensor detection area of the unmanned ship surface target detection and recognition is carried out by the fusion of optical cameras, navigation radar, and lidar, and the detection ranges of the sensors overlap each other.
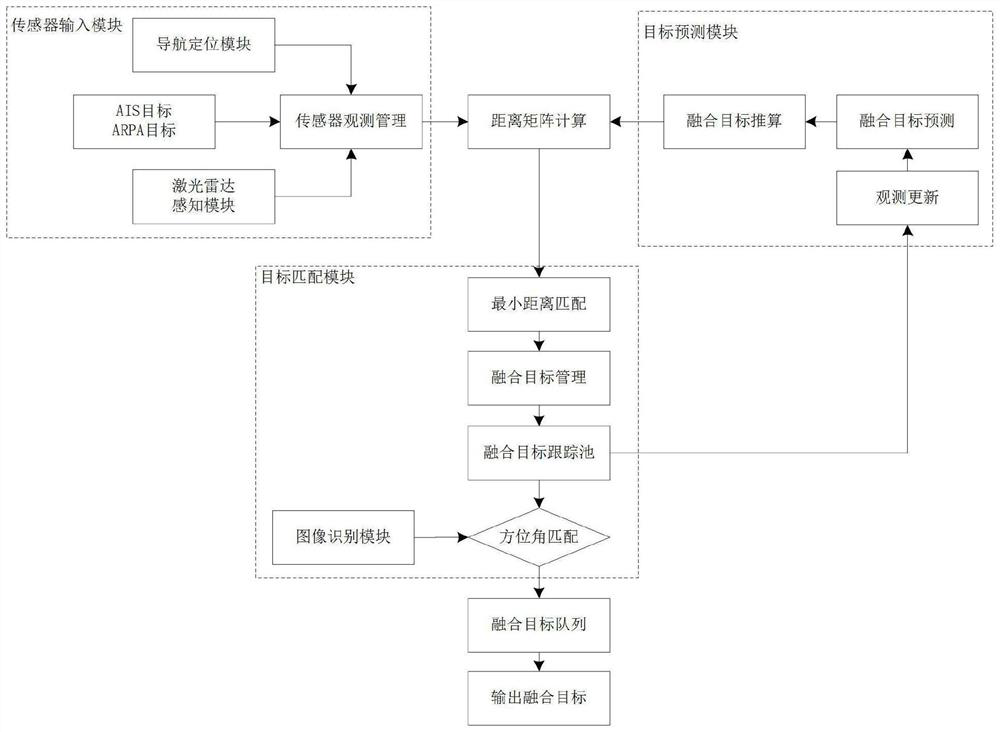
[0032] The process of the identification method is as follows figure 1 shown, including the following steps:
[0033] Step 1, use the calibration plate to calibrate the internal parameters of the optical camera, and measure the rotation a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More