

Method for dynamic attitude estimation of vehicle based on mems inertial sensor
An inertial sensor and attitude estimation technology, applied in the field of MEMS sensing, can solve the problems of gyroscope drift error, poor dynamic performance, large error, etc., and achieve the effect of improving accuracy and reducing drift error.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 2
[0117] Embodiment 2 effect experiment contrast
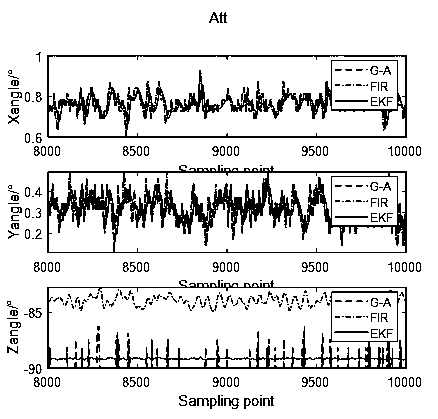
[0118] In this paper, three sets of experiments are set up for comparison to verify the effectiveness of the algorithm in this paper. The three sets of experiments are: 1) Static state plus high-frequency vibration experiment, the results are as follows image 3 As shown; 2) The swing test is carried out at a frequency of 0.5Hz and an amplitude of ±5°, and the results are as follows Figure 4 Shown; 3) The rotation test is carried out at an angular velocity of 50° / s, and the results are as follows Figure 5 shown. Each group of experiments is extremely three kinds of attitude calculation algorithms: the attitude calculation algorithm (G-A) using the accelerometer, the attitude calculation algorithm (FIR) using the FIR filter, and the EKF filter algorithm (EKF) designed by the application. By comparison Examine the performance of the three algorithms in different situations.
[0119] Depend on image 3 It can be seen that in ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More