

Real-time simulation and test method for control system of automatic driving truck
A control system, real-time simulation technology, applied in general control systems, control/regulation systems, testing/monitoring control systems, etc., can solve problems such as no driver assistance, reduce accident rates, improve stability, and shorten research and development. effect of cycles
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
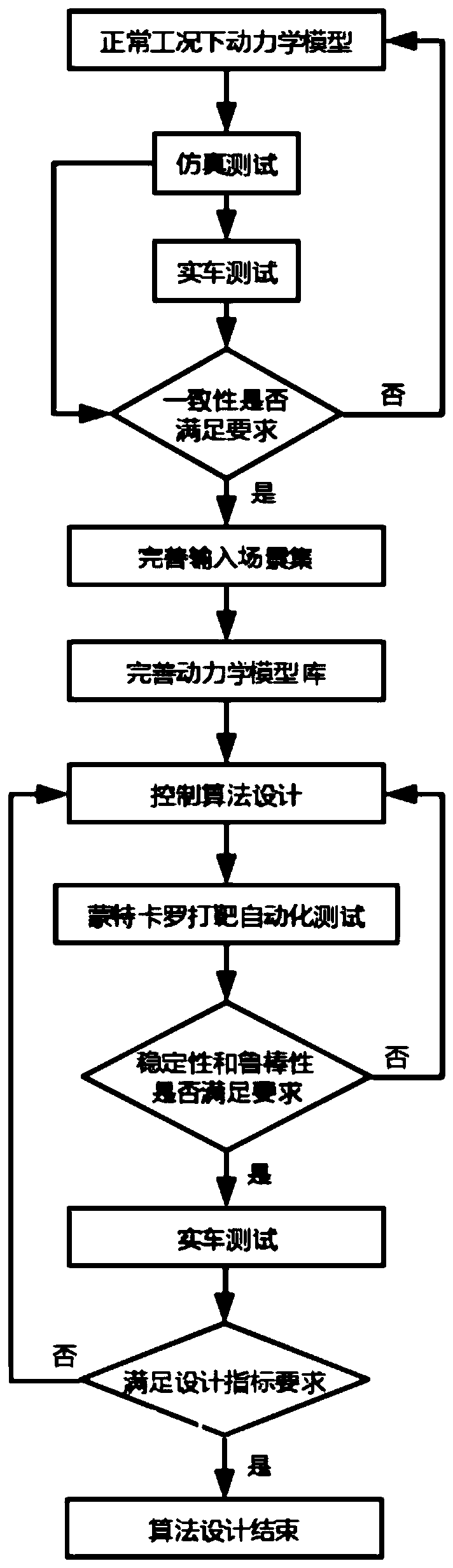
[0037] Refer to the attached Figure 1-4 , to further explain the real-time simulation and testing method of a control system of an autonomous truck according to the present invention. be construed as a limitation of the invention.
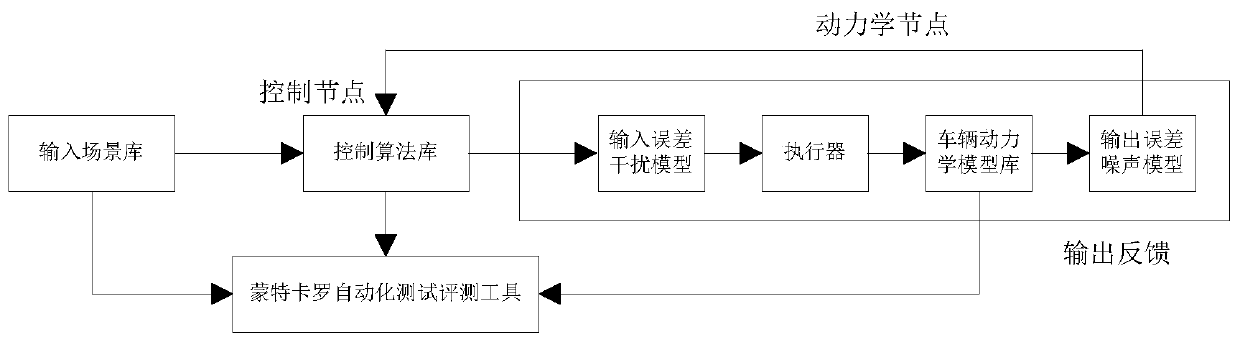
[0038] The working principle of the present invention is as figure 1 As shown, it is mainly divided into several parallel parts:
[0039] 1. Control input scene library;
[0040] 2. Control algorithm node;
[0041] 3. Dynamic node;
[0042] 4. Monte Carlo automatic test evaluation tool.
[0043] The main focus of the present invention is how to more perfect and efficiently design and verify the stability and robustness of the vehicle control system. First, establish a more accurate vehicle dynamics model, input error interference model and output error noise model, and verify and Improve the simulation platform to achieve a simulation performance that is consistent with the actual vehicle test. Then, on this basis, improve the control input ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More