

Active suspension control method and system
A technology of active suspension and control method, applied in suspension, elastic suspension, transportation and packaging, etc., can solve problems such as inability to adapt, reduce vehicle ride comfort, limited suspension damping adjustment, etc., to improve ride comfort , Good vehicle ride comfort, the effect of ensuring ride comfort
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
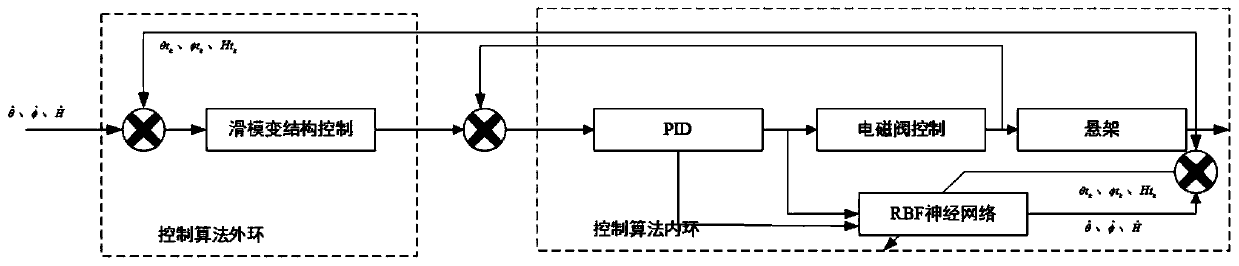
[0036] Embodiment 1, see attached figure 1 , 2 , an active suspension control method, comprising the following steps:
[0037] A. Real-time observation of the road at S meters ahead to obtain the unevenness curve of the road, and estimate the posture that the vehicle should maintain when it reaches the road at S meters, to obtain the expected value of the body posture; the expected value of the body posture specifically includes: expected body pitch angle Expected body roll angle and the desired vehicle height For the convenience of observation, while obtaining the roughness curve of the road, it can also establish the three-dimensional surface of the road ahead.
[0038] B. According to the current body posture, calculate the vehicle body posture compensation value when the vehicle arrives at the road surface at S meters at the moment; combine the current body posture and the vehicle body posture compensation value at this moment to obtain the suspension posture command...
Embodiment 2
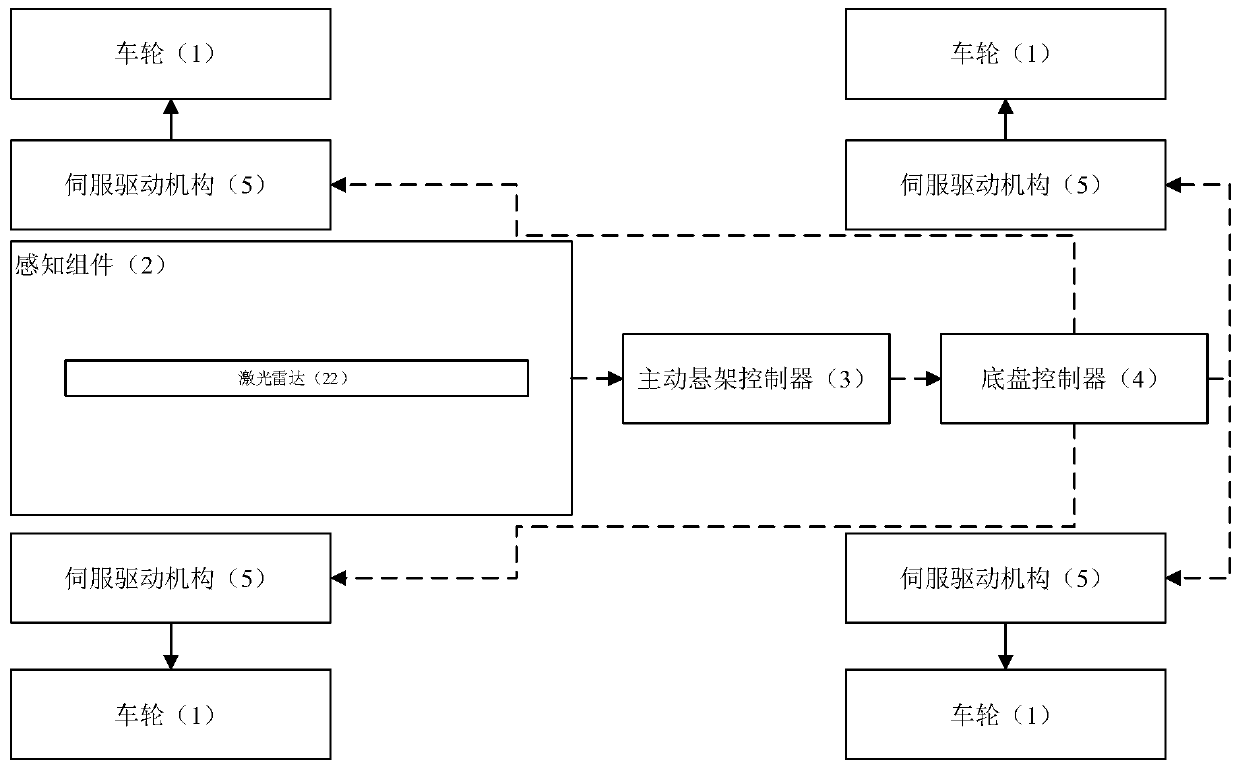
[0044] Embodiment 2, see attached Figure 4 , an active suspension control system, which includes: a perception component 2 installed in a vehicle, an active suspension controller 3 and a chassis controller 4 .
[0045] The sensing component 2 establishes a signal connection with the active suspension controller 3 , and the active suspension controller 3 establishes a signal connection with the chassis controller 4 .
[0046] The sensing component 2 is used to obtain vehicle speed, attitude, and road environment information; the sensing component 2 in this example uses a laser radar 22 .
[0047] The active suspension controller 3 acquires information according to the sensing component 2, and sends suspension posture instructions to the chassis controller 4.
[0048] One end of the suspension 9 is movably connected with the vehicle frame to form a dynamically changing suspension connection point, and the other end is connected to the wheel 1 .
[0049] The chassis controller...
Embodiment 3
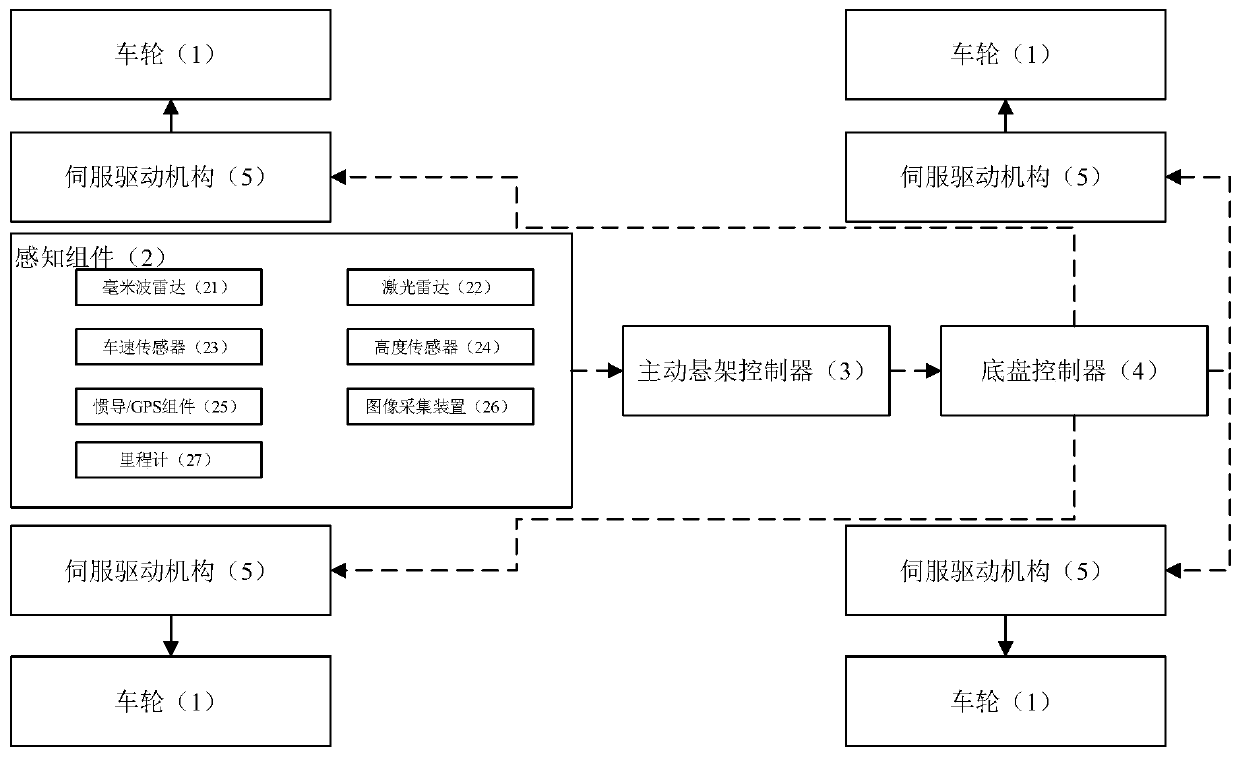
[0051] Embodiment 3, see attached Figure 5 On the basis of Embodiment 2, further, the perception component 2 may further include: any one or any combination of millimeter wave radar 21 , vehicle speed sensor 23 , height sensor 24 and inertial navigation / GPS component 25 .
[0052] Among them, the millimeter-wave radar 21 can be fused with the laser radar 22 to obtain road environment information; the vehicle speed sensor 23 can be used to detect the driving speed of the vehicle; the height sensor 24 can be used to detect the height of the vehicle chassis from the ground; inertial navigation / GPS The component 25 can be used to detect the pitch direction and the roll direction of the vehicle.
[0053] Further, the sensing component 2 may further include: an image acquisition device 26; the image acquisition device 26 is used to acquire the image of the vehicle 1 traveling on the road, combined with the millimeter-wave radar 21 and the laser radar 22, a three-dimensional model o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More