

Visual servo and manipulator based automatic docking system
A technology of automatic docking and visual servoing, which is applied in the directions of manipulators, program-controlled manipulators, liquid conveying devices, etc., can solve the problems of inability to meet the load of the aircraft docking process, unfavorable continuous operations for refueling operators, and high labor intensity of personnel. The effect of dispatching preparation time, reducing manual information transmission links, and improving docking control accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0035] The technical solution of the present invention will be further explained and described in detail according to the accompanying drawings and specific embodiments.
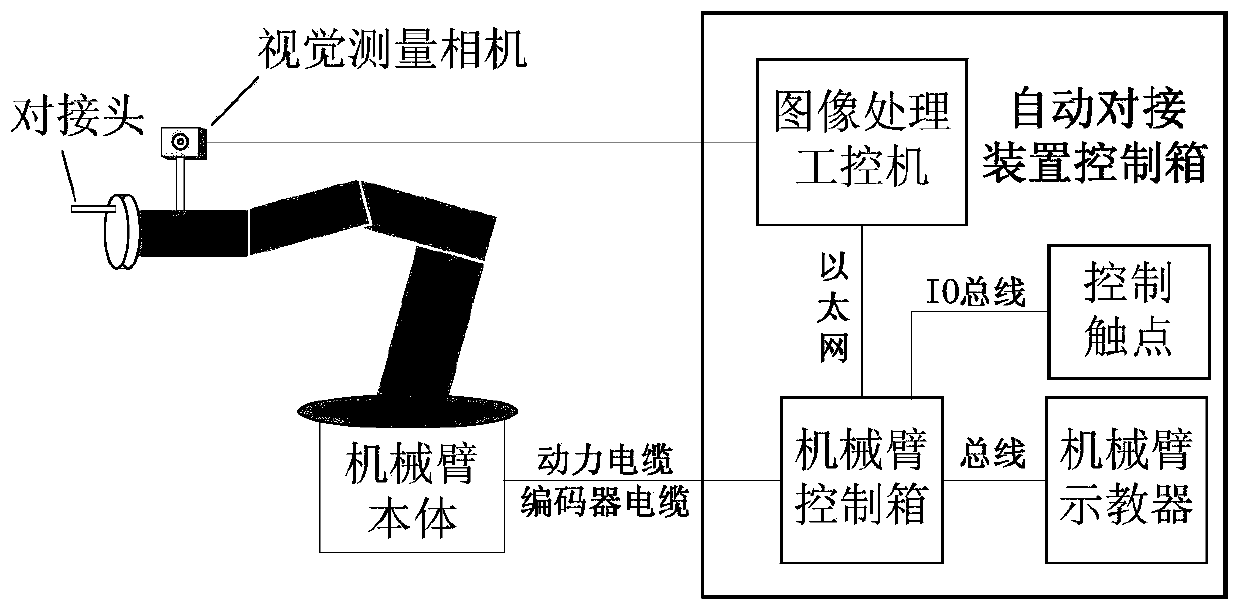
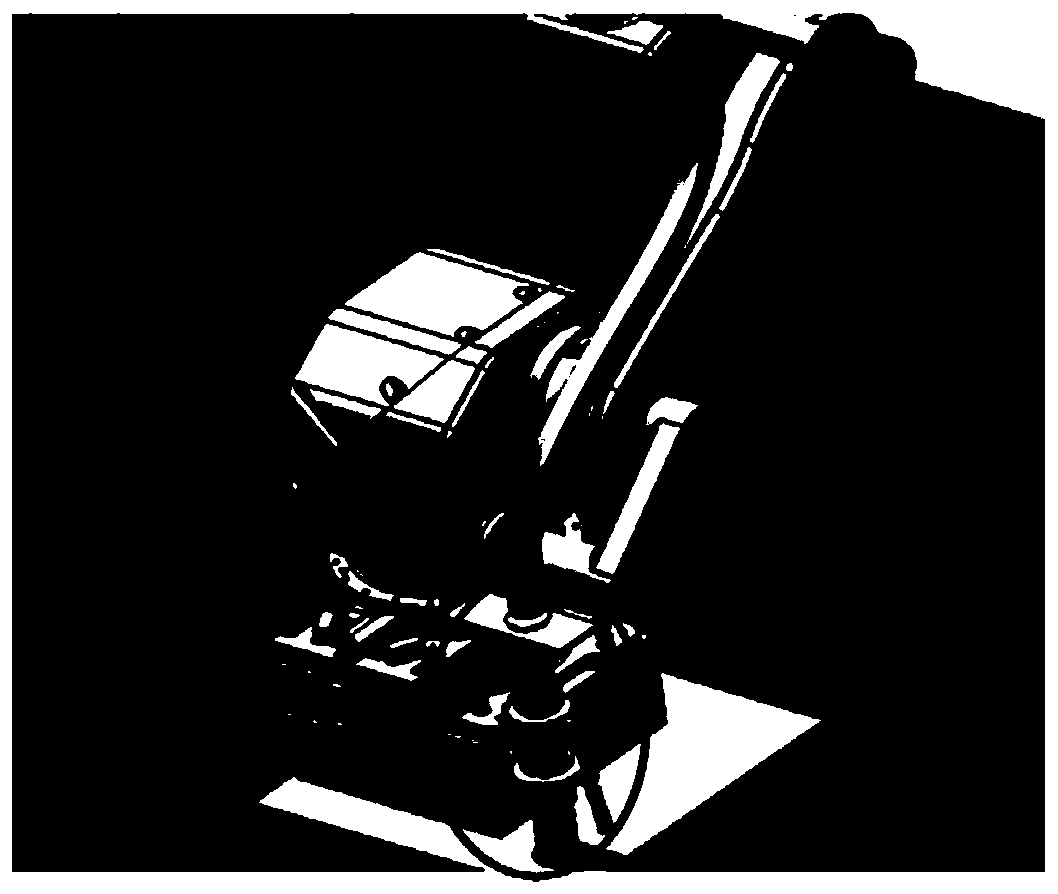
[0036] The robot arm automatic docking system based on visual servo is mainly composed of the robot arm body, the robot arm control box and the teaching pendant, the visual measurement camera and the image processing industrial computer. The basic dynamic docking system is shown in the figure figure 1 , the schematic diagram of the automatic docking system is shown in figure 2 , the block diagram of the automatic docking system is as follows Figure 5 shown.
[0037] The body of the robotic arm is fixedly connected to the joints of the aircraft support equipment, and can change the posture of the joints by adjusting the state of its own joints. The visual measurement camera and the image processing industrial computer capture the aircraft fuselage interface by taking pictures of the aircraft fuselage, and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More