

Robot precision compensation method based on parameter dimension reduction identification
An accuracy compensation and robot technology, applied in the field of robot calibration, can solve the problem that the control system is not open to the outside world and cannot compensate for the D-H parameter error, etc., and achieves the effect of improving absolute positioning accuracy, reducing position error, and reducing the amount of identification calculation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
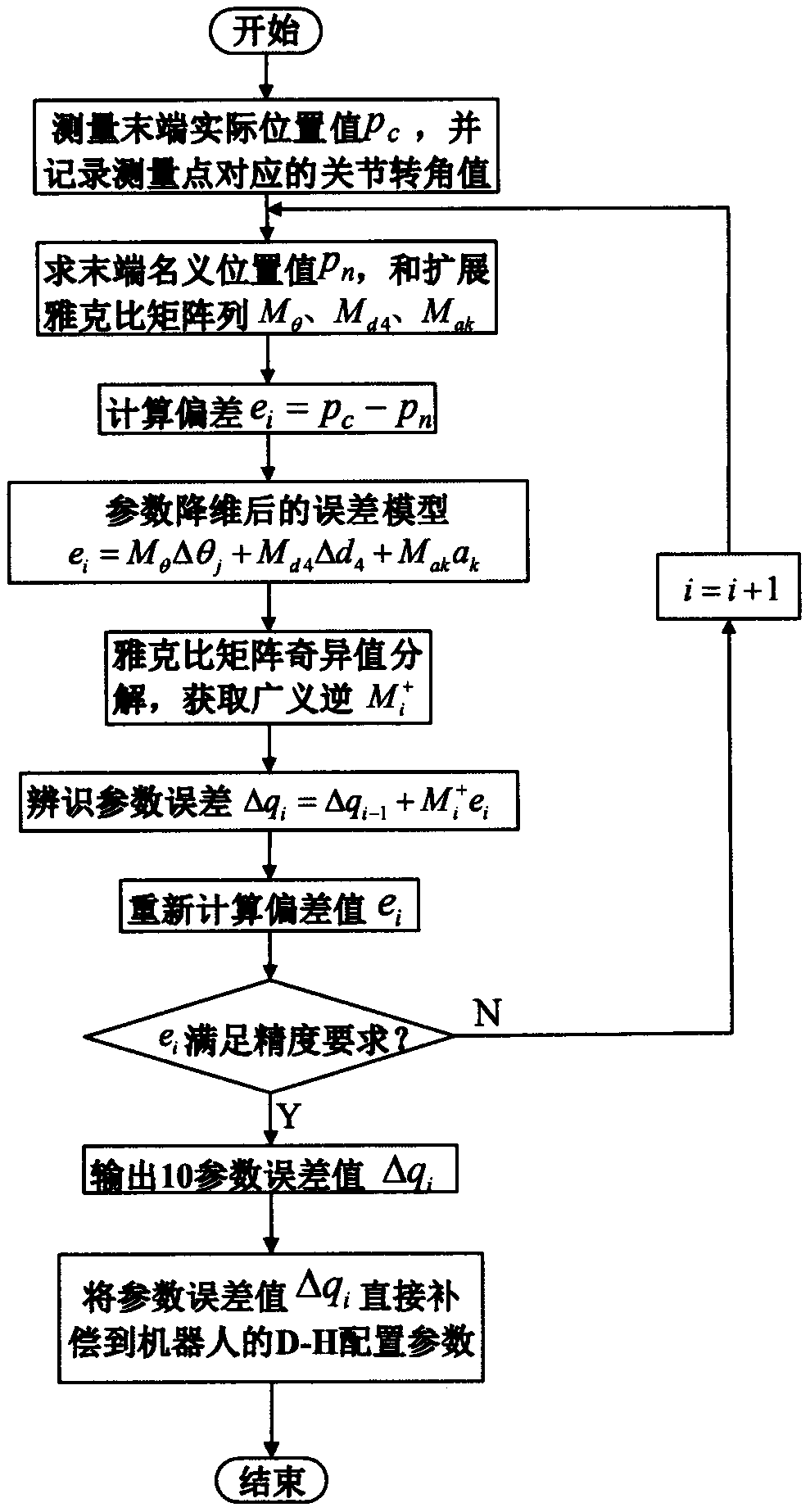
Method used
Image



Examples
Embodiment
[0023] Embodiment: According to the structural parameters of the robot and the establishment principle of the homogeneous transformation matrix, the kinematic relationship between two adjacent rods of the Kawasaki RS010NA six-degree-of-freedom industrial robot is established. The kinematic relationship between two adjacent bars is:
[0024]
[0025] In formula (1), s and c are simplified forms of sin and cos respectively, θ i is the joint rotation angle, a i is the joint torsion angle, d i is the joint offset, β i is the rotation angle around the y-axis.
[0026] For a six-degree-of-freedom industrial robot, the error in each joint coordinate system is transferred to the end of the robot, and the homogeneous transformation matrix at the end of the robot is obtained as:
[0027]
[0028] In formula (2) represents the homogeneous transformation of the link from the base coordinates to the ends, arrive represents the link homogeneous transformation of adjacent lin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More