

A wall-climbing robot system for hull paint removal
A wall-climbing robot and robot technology, which is applied to ship hulls, ship construction, ship cleaning devices, etc., can solve problems such as low efficiency and operators cannot work for a long time, and achieve the effects of improving efficiency, reducing load and saving time.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
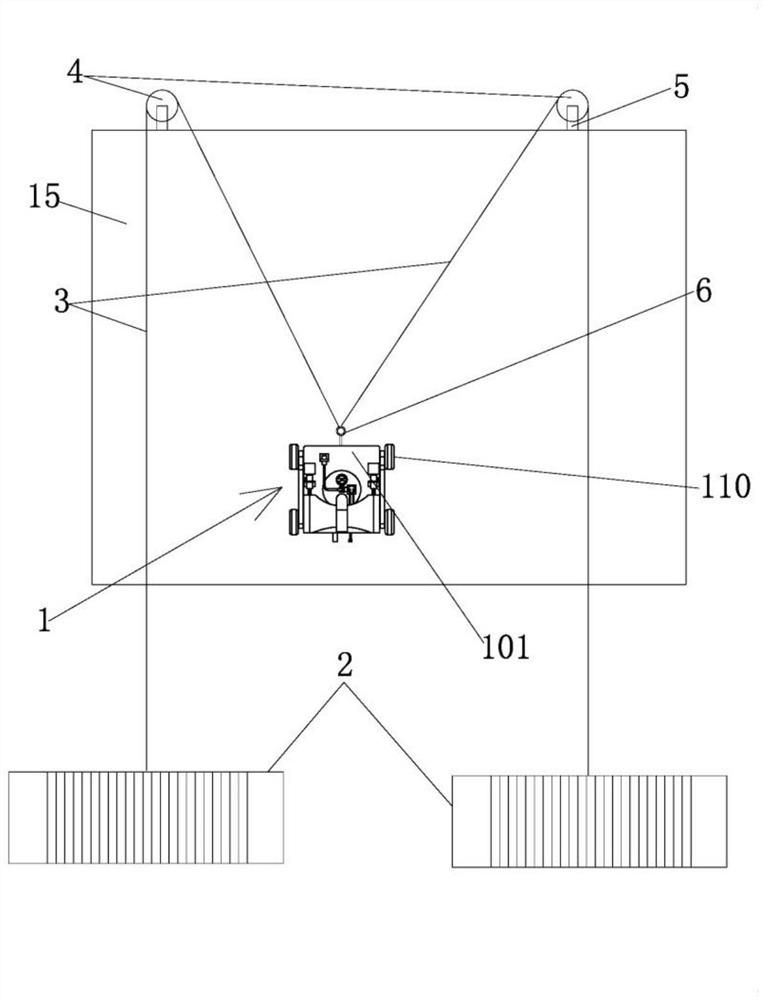
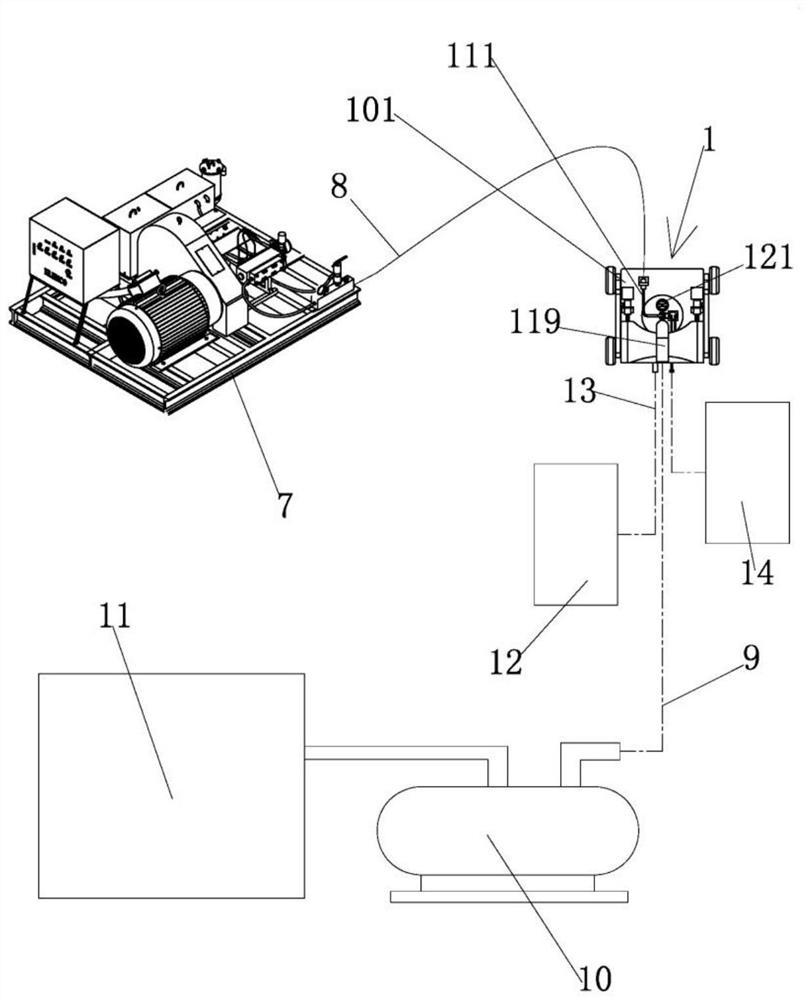
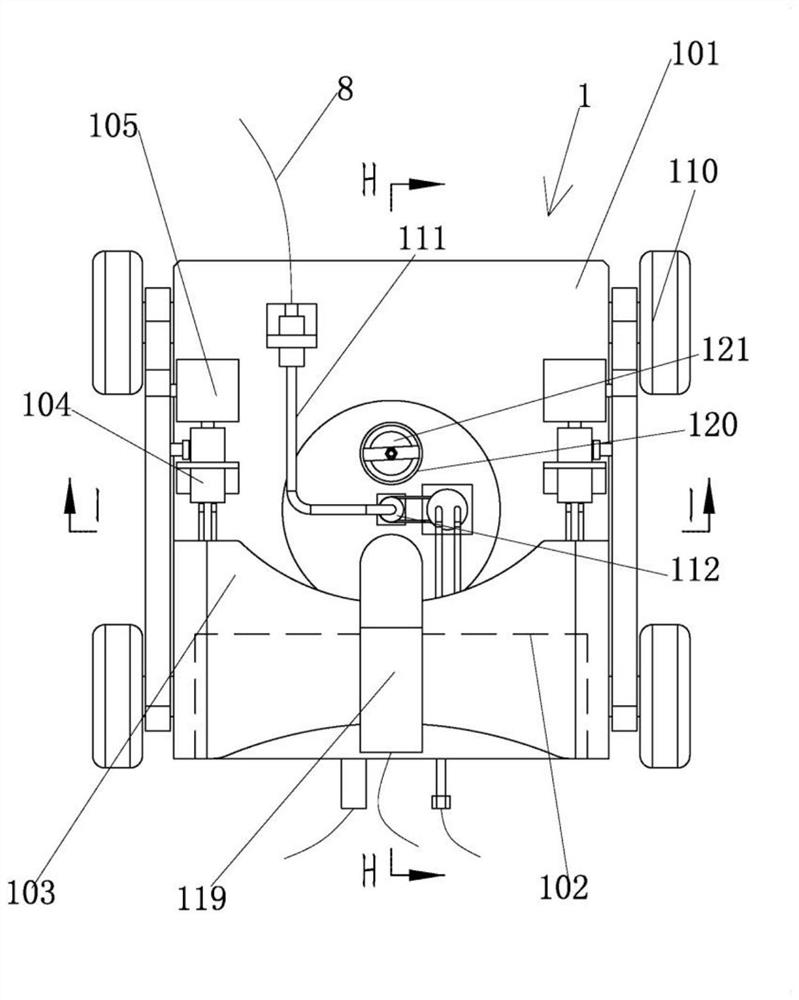
[0032] Attached below Figure 1-6 The present invention is further illustrated with specific examples.
[0033] Such as Figure 1-6 As shown, a hull wall-climbing robot system for paint removal includes a robot main body 1 that automatically crawls on the hull wall 15 under remote control, and a lifting component that hangs the robot main body 1 .
[0034] Above-mentioned robot main body 1 comprises:
[0035] Robot Framework 101;
[0036] Two pairs of walking wheels 110 respectively rotate and are arranged on the left and right sides of the robot frame 101;
[0037] The walking driving mechanism installed on the robot frame 101 is used to drive two pairs of walking wheels 110 to roll on the hull wall 15;
[0038] The spray washing mechanism installed on the robot frame 101 is used to wash away the old paint on the hull wall 15; and
[0039] A sewage recycling mechanism for recycling sewage arranged on the robot frame 101 .
[0040] Wherein, the sewage discharge end of th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More