

Method and system for vehicle body dynamic attitude estimation based on mems sensor
An attitude estimation and sensor technology, applied in the field of MEMS sensing, can solve the problems of dynamic attitude estimation error, inertial sensor drift, influence, etc., and achieve the effect of high precision and accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
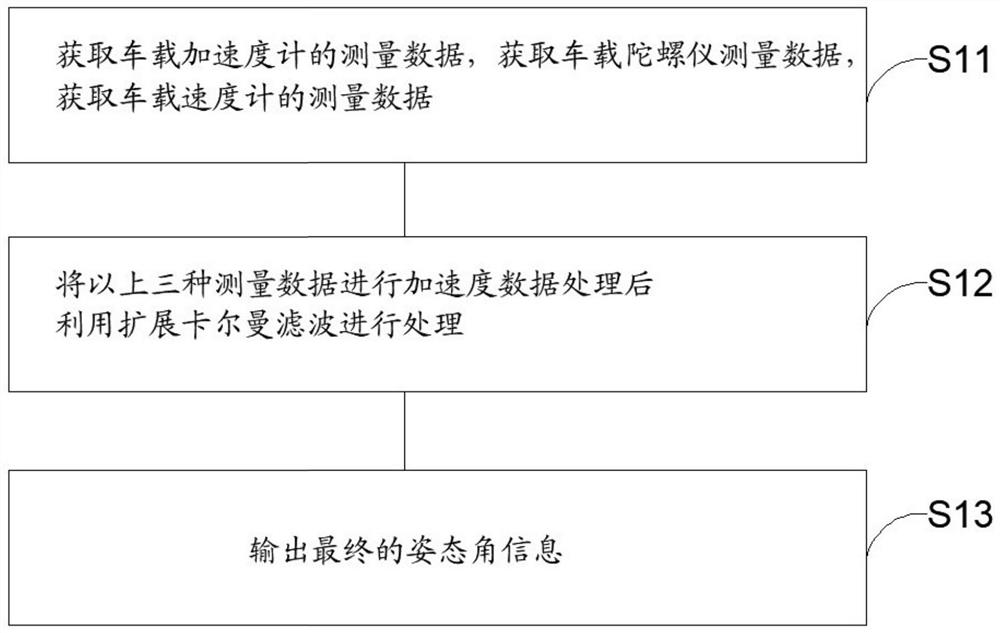
[0052] A method for estimating the dynamic posture of a car body based on a MEMS sensor is provided, comprising the following steps:
[0053] Obtain the measurement data of the on-board accelerometer; obtain the measurement data of the on-board gyroscope; obtain the measurement data of the on-board speedometer; process the above three measurement data with acceleration data and use Kalman filter to process them, and output new data according to the filtered data attitude angle.
[0054] In some embodiments, the Kalman filtering process includes the following steps:
[0055] Determine the system model as:
[0056]
[0057] where: x (k) ∈ R n is the state vector of the system at time k, z (k) ∈ R m is the observation vector at time k; f(·) is an n-dimensional vector function, h(·) is an m-dimensional vector function, f(·) and h(·) are nonlinear functions of their independent variables; w(k)∈ R n and v(k)∈R m are the associated process noise vectors Q(k) and R(k) with ...
Embodiment 2
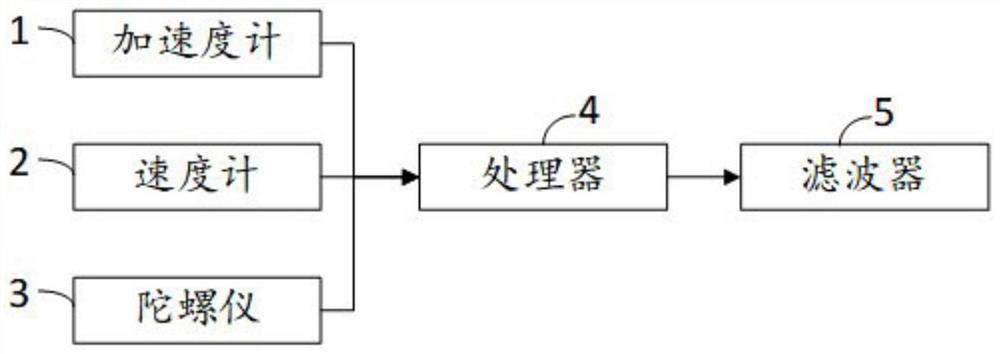
[0090] The inertial system of the vehicle body dynamic attitude estimation method based on MEMS sensing includes an accelerometer, a magnetometer, a gyroscope, a processor and a filter, and the data output terminals of the accelerometer, the magnetometer and the gyroscope are connected to the processor The input end of the processor is connected to the input end of the filter, and the data output end of the processor is connected to the input end of the filter. The processing method of the filter is the same as that described in Embodiment 1, and will not be repeated here.
Embodiment 3
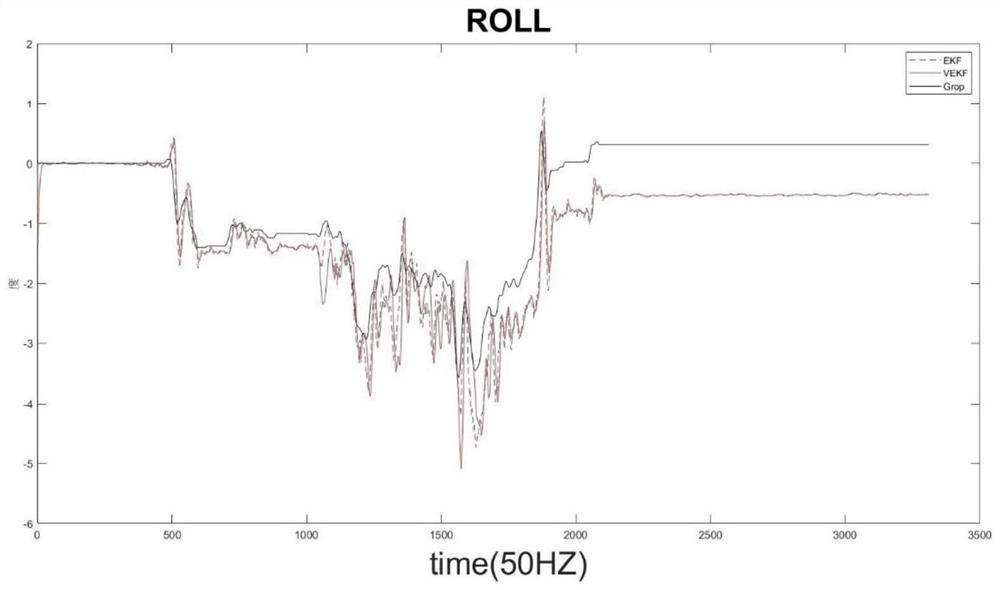
[0092] The high-precision attitude measurement unit (BW VG500) used by the technical solution of the present application includes a three-axis gyroscope, a three-axis accelerometer and a high-performance STM32f103 microprocessor, which is installed on a sports car body, such as on the rear axle of a tricycle, And use Omron's 1AG3-AG5B. Install the encoder on the steering system tap The value encoder has got the steering system message and added to the Kalman filter equation. Also, a stepping motor HQS86H was used and mounted on the rear axle. The raw data of MEMS can be measured by the microprocessor, the frequency is set to 50HZ, the sensor is sampled, and then the data filtering and fusion processing are performed. Accurate gesture information is obtained through the gesture fusion algorithm designed by MATLAB.
[0093] In order to verify the method in this application, the specific experimental results can be found in Figure 3-Figure 6 .
[0094] (1) The motion state o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More