

Unmanned aerial vehicle path planning method based on control parameterization
A technology for controlling parameters and path planning, applied in the direction of non-electric variable control, control/regulation system, two-dimensional position/course control, etc., can solve problems such as nonlinearity, underactuation, and failure to consider UAV dynamic constraints. Achieve the effect of stable motor speed change, small optimal path error, and stable and feasible motion trajectory
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
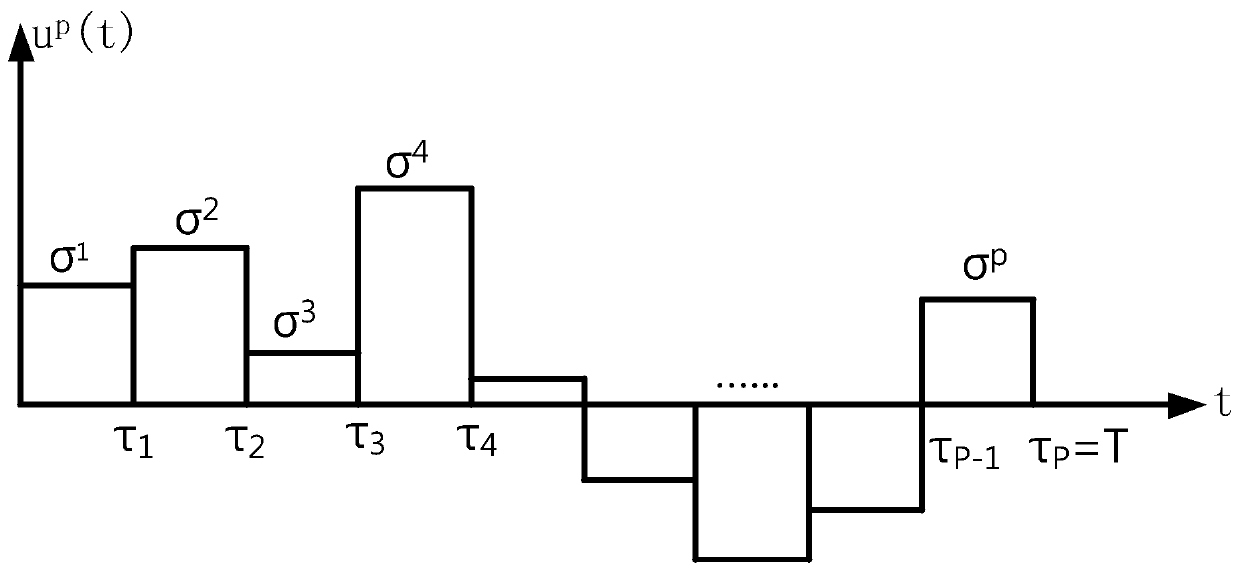
[0030] Such as Figure 1 to Figure 10 As shown, the UAV path planning method based on control parameterization mainly includes four steps: nonlinear programming modeling, control parameterization, constraint transcription processing and gradient formula solution.
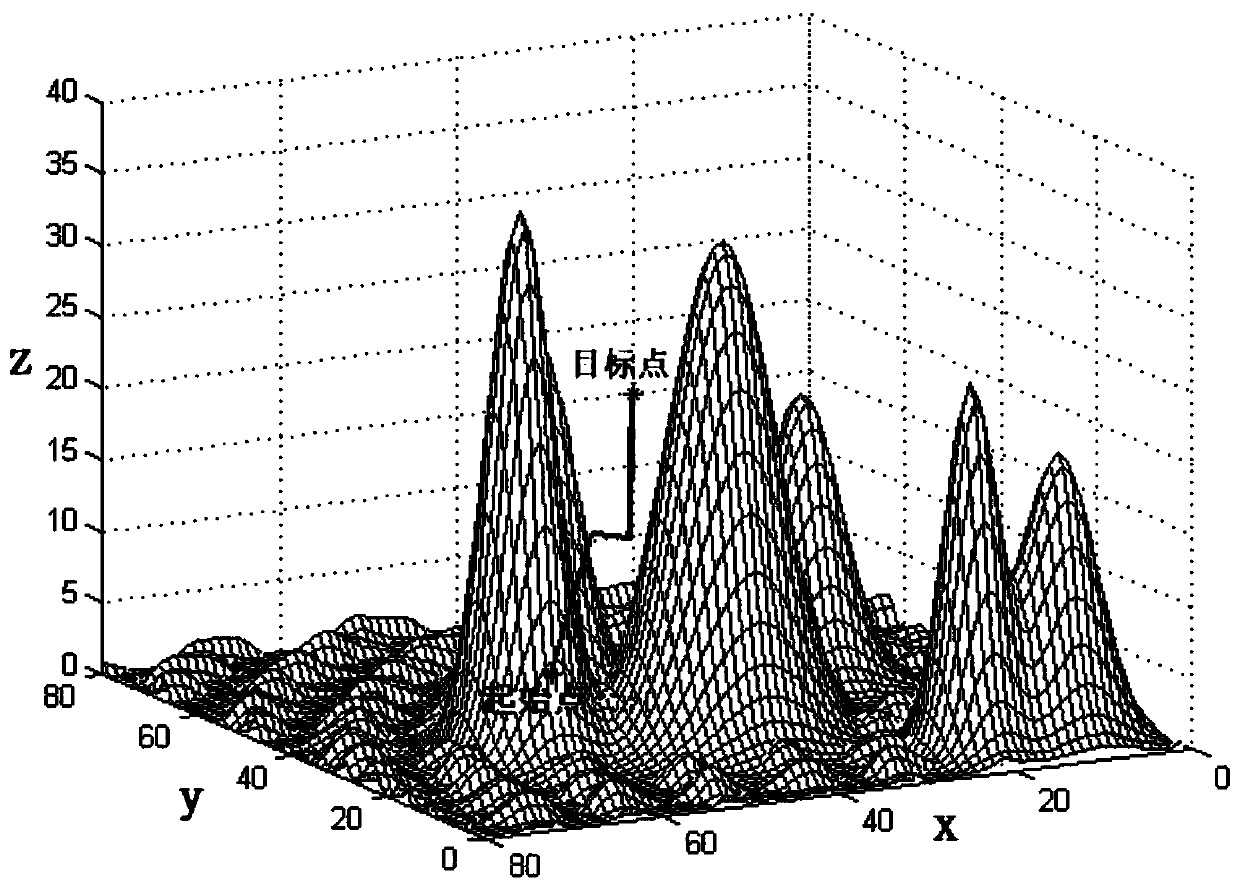
[0031] (S1) Nonlinear programming modeling: Select the state variables and control variables according to the nonlinear dynamic equation of the UAV and rewrite them into the form of a state space model, using the UAV's own performance index constraints and obstacles in the environment Object constraints, modeled as UAV continuous state inequality constraints, take the UAV's initial state and target point as the boundary constraint conditions, take the UAV flight time as the optimized objective function, and transform the UAV path planning problem into The nonlinear optimal control problem for the minimization of flight time of the UAV is to solve the optimal control variable u(t) to minimize the flight time T and sa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More