Non-iterative point cloud matching method, medium, terminal and device
A point cloud matching, non-iterative technology, applied in the field of navigation and positioning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] In order to make the object, technical solution and beneficial technical effects of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments. It should be understood that the specific implementations described in this specification are only for explaining the present invention, not for limiting the present invention.
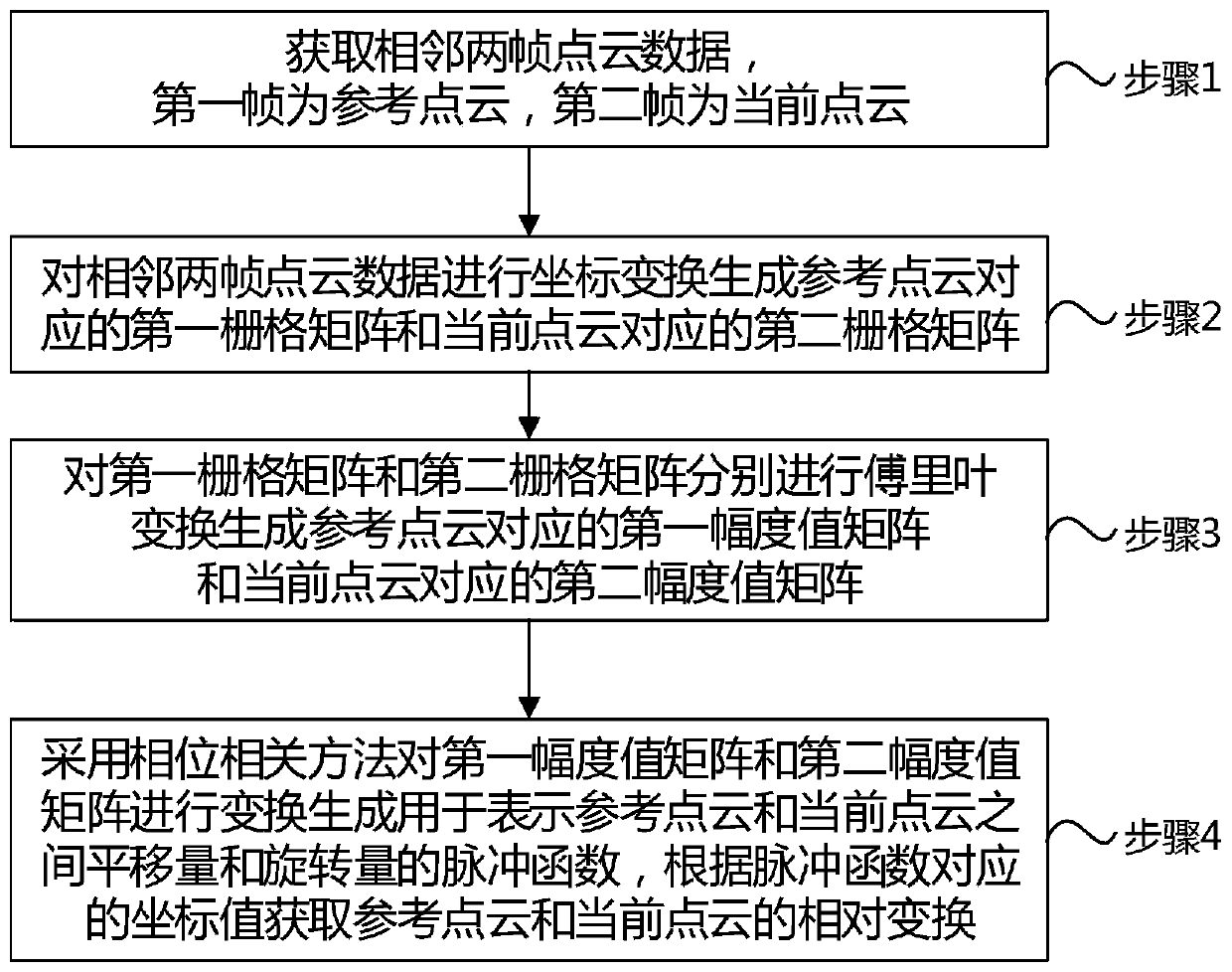
[0051] figure 1 is a schematic flow diagram of a non-iterative point cloud matching method provided in Embodiment 1 of the present invention, as figure 1 As shown, the method includes the following steps:
[0052] Step 1. Obtain two adjacent frames of point cloud data, the first frame is the reference point cloud, and the second frame is the current point cloud;
[0053] Step 2, performing coordinate transformation on two adjacent frames of point cloud data to generate a first grid matrix corresponding to the reference point cloud and a second gr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More