

Vehicle four-wheel drive control method and electronic device
A control method and vehicle technology, applied in control devices, vehicle parts, transportation and packaging, etc., can solve problems such as difficulty in starting, limiting the use time of the four-wheel drive system, and slow intervention of the four-wheel drive system, so as to avoid frequent intervention and prevent overheating Protect and eliminate the effect of speed difference
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
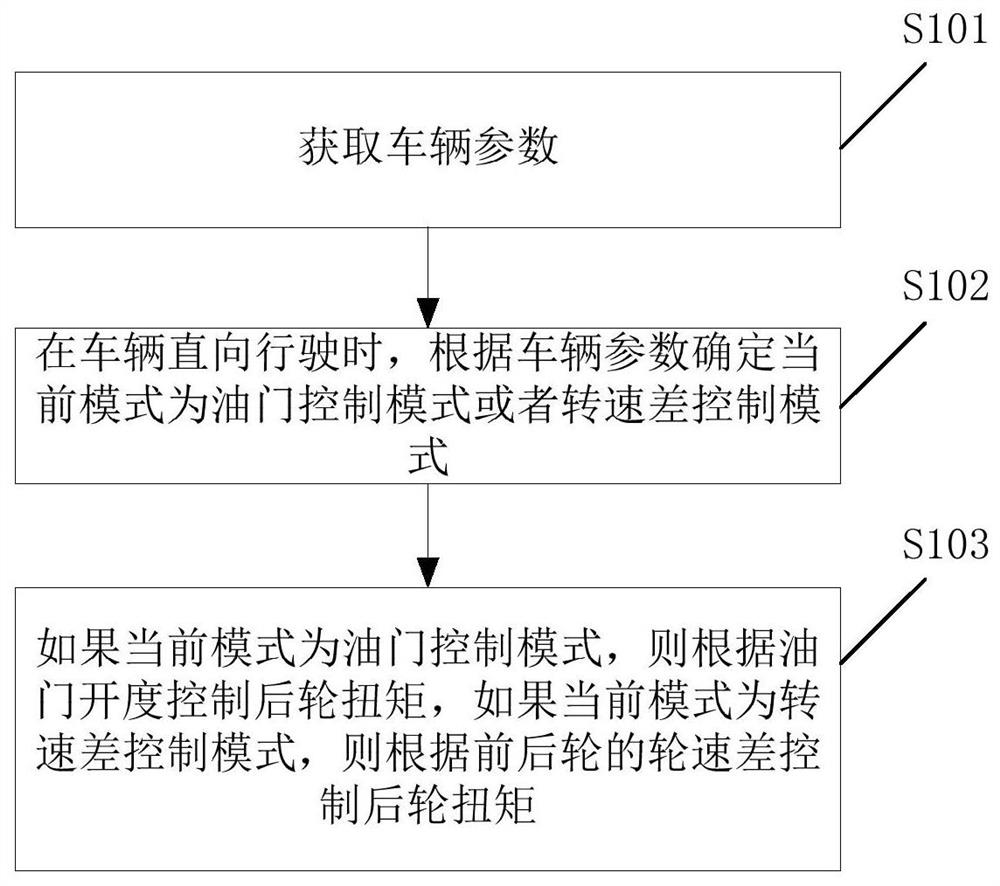
[0067] Such as figure 1 Shown is a working flow chart of a vehicle four-wheel drive control method of the present invention, including:
[0068] Step S101, acquiring vehicle parameters;
[0069] Step S102, when the vehicle is running straight ahead, according to the vehicle parameters, determine whether the current mode is the throttle control mode or the rotational speed difference control mode;
[0070] Step S103, if the current mode is the throttle control mode, control the rear wheel torque according to the throttle opening, and if the current mode is the speed difference control mode, control the rear wheel torque according to the wheel speed difference between the front and rear wheels.
[0071] In particular, the present invention is preferably applied to an on-vehicle electronic control unit. The on-vehicle electronic control unit continues to execute step S101 to obtain vehicle parameters, and when the vehicle is running straight ahead, trigger step S102 to determin...
Embodiment 2
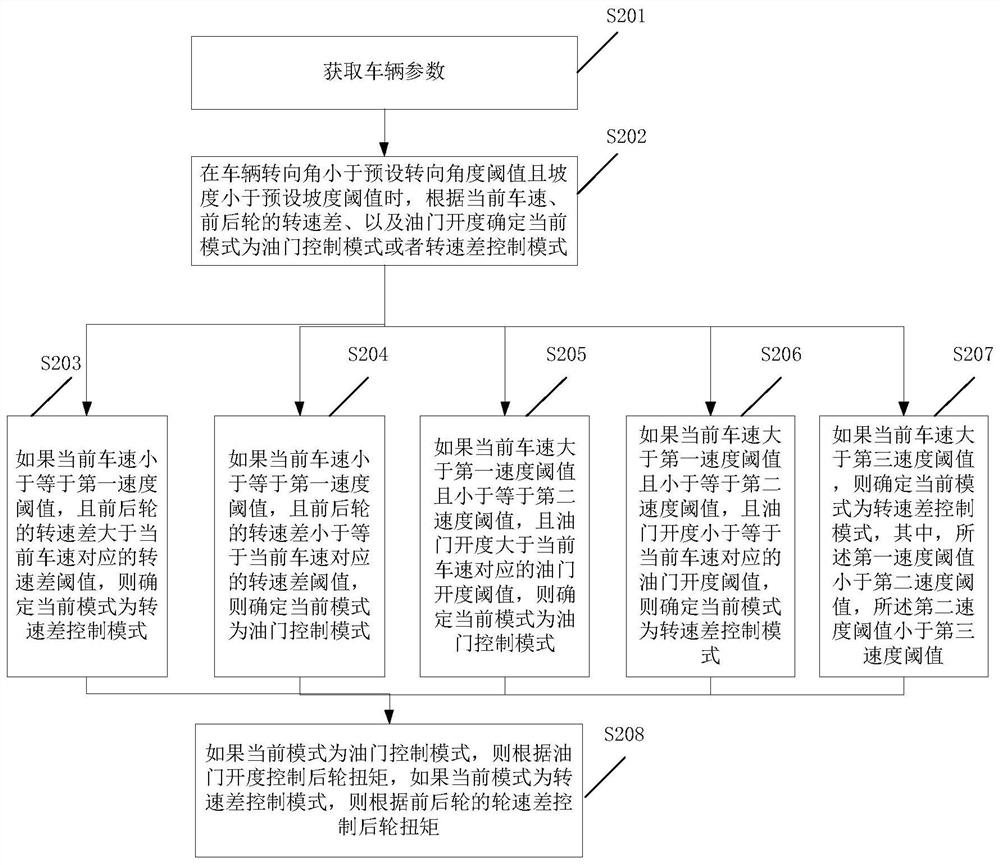
[0074] Such as figure 2 Shown is a working flow chart of a vehicle four-wheel drive control method according to the second embodiment of the present invention, including:
[0075] Step S201, acquiring vehicle parameters;
[0076] Step S202, when the steering angle of the vehicle is smaller than the preset steering angle threshold and the slope is smaller than the preset slope threshold, determine that the current mode is the throttle control mode or the speed difference control mode according to the current vehicle speed, the speed difference between the front and rear wheels, and the throttle opening;
[0077] Step S203, if the current vehicle speed is less than or equal to the first speed threshold, and the speed difference between the front and rear wheels is greater than the speed difference threshold corresponding to the current vehicle speed, then determine that the current mode is the speed difference control mode;
[0078] Step S204, if the current vehicle speed is l...
Embodiment 3
[0123] Such as Figure 12 Shown is a working flow chart of a vehicle four-wheel drive control method in the preferred embodiment of the present invention, including:
[0124] Step S1201, vehicle sensor & CAN signal acquisition;
[0125] Step S1202, signal processing;
[0126] Step S1203, if it is straight driving, identify the vehicle driving condition by the parameter "vehicle speed v / accelerator acc / front and rear wheel speed difference Δv", and then execute step S1206:
[0127] If it is a starting condition, the road surface is bad, the current vehicle speed v is less than the first speed threshold V1, and the speed difference Δv of the front and rear wheels is greater than the speed difference threshold corresponding to the current vehicle speed, then the torque is calculated according to the speed difference Δv;
[0128] If it is the starting condition, the road surface is good, the current vehicle speed v is less than the first speed threshold V1, and the speed differe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More