

A method and system for controlling direction adjustment of a horizontal drilling rig
A technology of horizontal drilling rig and control method, which is applied in the direction of drilling automatic control system, drilling equipment and method, drilling equipment, etc., and can solve the problem of inability to quickly and stably track the set value, great influence of technical level, unstable operation effect, etc. problem, to achieve the effect of reducing manual fatigue, fast-tracking response, and reducing the degree of manual intervention
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
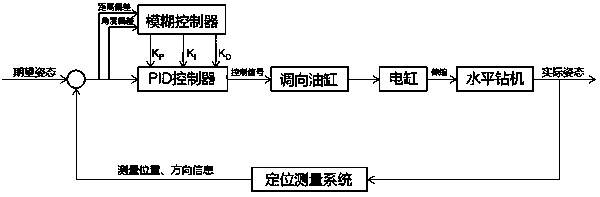
[0043] see figure 1 , a steering control system for a horizontal drilling rig, including a positioning measurement system, a fuzzy controller, a PID controller and a steering oil cylinder arranged on the drilling rig, the positioning measurement system is used to collect real-time position information of the drilling rig, and the fuzzy control The controller is used to receive the real-time angle and vertical deviation distance of the drilling rig, and load the parameters of the PID controller according to the set fuzzy control rules K P , K I and K D , the PID controller sends an action signal to the corresponding steering oil cylinder according to the real-time PID parameters, and the steering oil cylinder drives the drilling rig to adjust the steering through its own action, so that the drilling machine can advance according to the predetermined route.
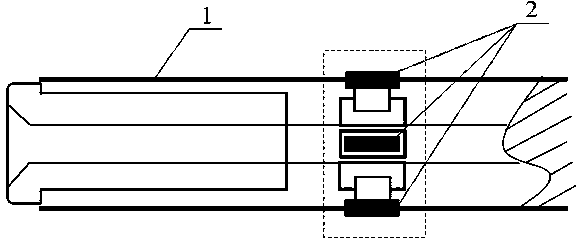
[0044] see figure 2 , in this embodiment, the number of the steering oil cylinders is four groups and they are ar...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More