

Light gradient boosting machine-based (Light GBM-based) exoskeleton gait prediction method
A prediction method and exoskeleton technology, applied in the directions of diagnostic recording/measurement, appliances that help people move, sensors, etc., can solve the problems of overfitting, large amount of calculation, large memory occupation, etc., to achieve strong accuracy and reduce training. effect of time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] In order to make the purpose, technical solution and key points of the present invention clearer, the following will further describe in detail the embodiments of the present invention in conjunction with the accompanying drawings.
[0056] A method for predicting the gait of an exoskeleton based on LightGBM, comprising the following steps:
[0057] 1. Data collection stage
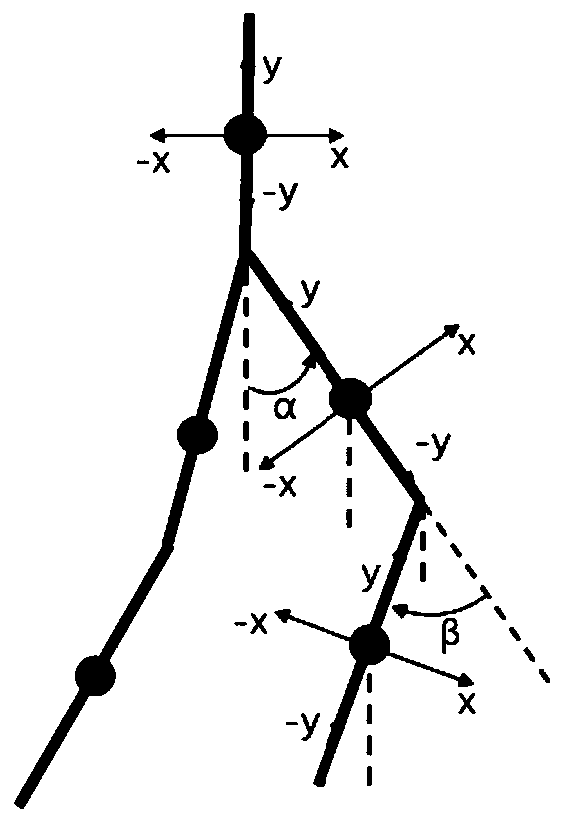
[0058] Set five IMU sensors on the user's waist, left thigh, left calf, right thigh, and right calf; according to the structure of the lower limbs of the human body, the following can be simplified figure 2 In the lower limb model diagram, 5 black dots represent the positions of 5 IMU sensors. Each IMU sensor provides the acceleration component of each leg on the two-dimensional plane during the walking process of the human lower limbs. The hip joint takes the counterclockwise direction as the positive direction, and the knee joint Taking clockwise as the positive direction, obtain the acceleration...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More