

Planning and control method of a crawler-type unmanned vehicle on cliff obstacle road
A technology of unmanned vehicles and control methods, which is applied in the field of planning and control of tracked unmanned vehicles on cliff and obstacle roads, and can solve the problem of not considering the impact of step passability, vehicles can only stop and alarm, and the degree of intelligence is low and other issues to achieve the effect of saving time and energy consumption, improving efficiency, and accurate size data
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0029] A preferred embodiment of the present invention will be described in detail below in conjunction with the accompanying drawings.
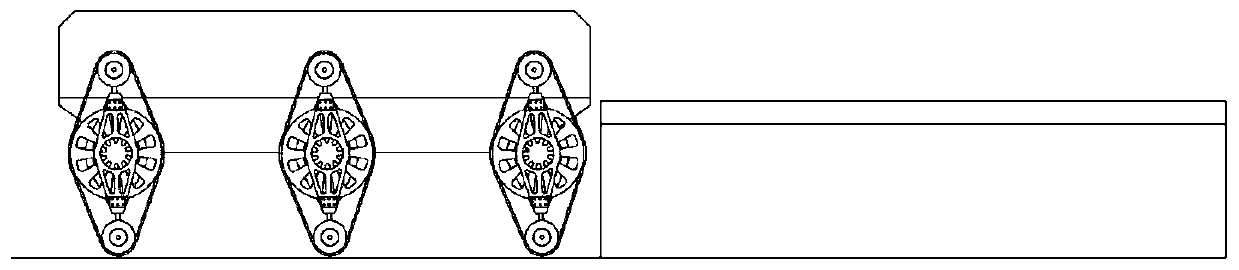
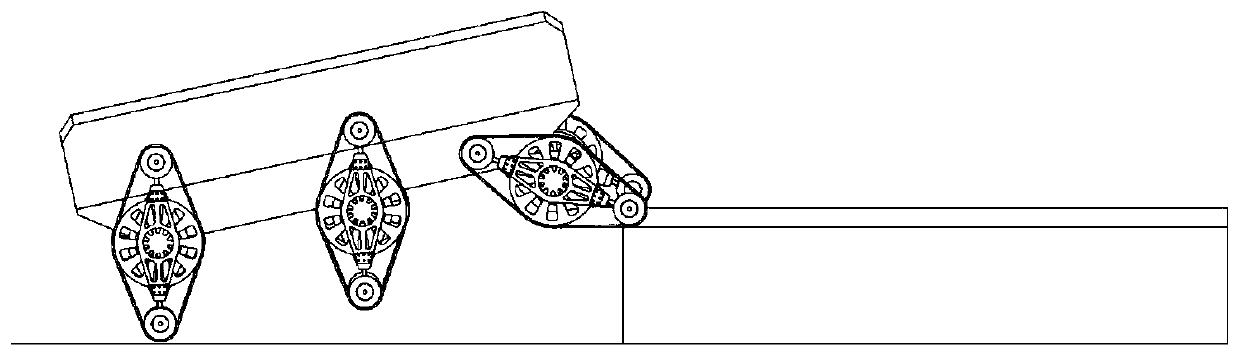
[0030] Such as Picture 8 , 11 As shown in and 12, the crawler-type unmanned vehicle used in the present invention includes a vehicle body and a left and right traveling mechanism driven by a driving mechanism. In this embodiment, the six-legged unmanned vehicle is the vehicle body structure of the invention patent "a highly maneuverable and highly adaptable ground unmanned vehicle" with the patent application number "CN201610241122.9", including a vehicle body and six feet. Crawler walking mechanism, the walking mechanism is located on both sides of the vehicle, and the three left and right sides are arranged symmetrically, forming a six-track vehicle structure. The left and right walking mechanisms are respectively left front walking mechanism, right front walking mechanism, left middle walking mechanism, right middle walking mechanism, left ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More