

Escort Mission Cooperative Control Method and System Based on Obstacle Environment and Bounded Input
A technology of collaborative control and control method, applied in general control systems, control/regulation systems, adaptive control and other directions, can solve the problems of not considering the input bounded, large torque, unable to get practical application, etc., to achieve compensation for interference, continuous Control signals, easy-to-implement effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
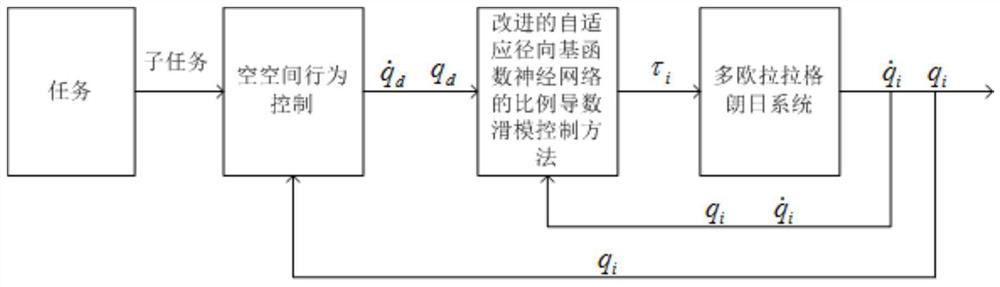
[0048] In one or more embodiments, a collaborative control method for escort missions based on obstacle environment and bounded input is disclosed, refer to figure 1 ,include:
[0049] The physical model of the escort mission is described by the Doule-Lagrangian system;
[0050] The inner and outer loop control structure is adopted, and the outer loop adopts the behavior control method based on empty space to generate the desired speed and expected motion trajectory required by the physical model of the inner loop; the inner loop is based on the proportional derivative sliding mode of the improved adaptive radial basis function neural network The control method enables each physical model to track the desired speed and desired motion trajectory in the presence of disturbances and parameter uncertainties, achieving zero steady-state error and bounded input.
[0051] In this embodiment, in order to avoid obstacles and form a convoy formation, the empty space-based behavior (NSB...
Embodiment 2
[0191] In one or more embodiments, an escort task cooperative control system based on obstacle environment and bounded input is disclosed, including: a controller, the controller adopts an inner and outer loop control structure, and the outer loop adopts an empty space-based behavior The control method generates the desired speed and desired trajectory required by the physical model of the inner ring; the inner ring is based on the proportional derivative sliding mode control method of the improved adaptive radial basis function neural network, so that in the case of interference and parameter uncertainty , each physical model is capable of tracking desired velocity and desired motion trajectory, achieving zero steady-state error and bounded input.
[0192] For the specific implementation method of the above controller, refer to the method disclosed in the first embodiment.
Embodiment 3
[0194] In one or more embodiments, a terminal device is disclosed, which includes a processor and a computer-readable storage medium, the processor is used to implement instructions; the computer-readable storage medium is used to store multiple instructions, and the instructions are suitable for Because the processor loads and executes the escort task cooperative control method based on the obstacle environment and bounded input in the first embodiment.
[0195]In another or more embodiments, a computer-readable storage medium is disclosed, in which a plurality of instructions are stored, and the instructions are suitable for being loaded by a processor of a terminal device and executing the obstacle-based environment and Cooperative control method for escort missions with bounded input.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More