

Robotic fish closed-loop feedback control method based on CPG model
A control method and closed-loop feedback technology, applied in the field of bionic robotic fish, can solve the problems of lack of effective control methods for autonomous swimming of robotic fish, difficulty in realizing feedback control of robotic fish, etc., so as to improve the stability of motion coordination and the ability to adapt to the environment. , good parameter mutation adaptability, the effect of improving swimming flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036]In order to fully and clearly demonstrate the purpose, technical solutions and advantages of the present invention, the specific implementation of the closed-loop control method for robotic fish based on the CPG model will be further described in detail below in conjunction with the accompanying drawings. It should be noted in advance that for the convenience of description, the given drawings are only partial structural schematic diagrams related to the present invention, not all embodiments of the present invention.
[0037] A method for closed-loop feedback control of robotic fish based on CPG model, comprising the following steps:
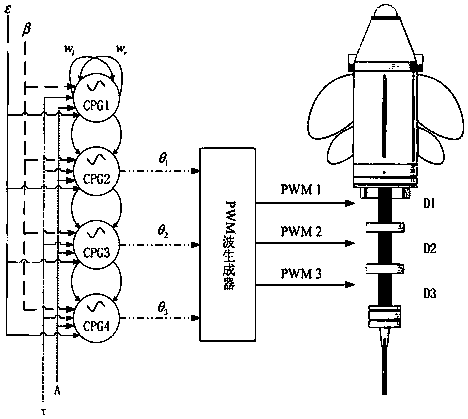
[0038] Step 1), construct the CPG model of the bionic robotic fish based on the form of chain coupling of multiple CPG units; each CPG unit is used to control the motion angle of a joint-driven steering gear; the joint-driven steering gear of each CPG unit is a chain formula coupling relationship, and adopts the nearest neighbor coupling ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More