

Underwater robot trajectory tracking method based on double-BP network reinforcement learning framework
An underwater robot, BP network technology, applied in the direction of instruments, non-electric variable control, height or depth control, etc., can solve the problem of time-consuming and labor-intensive online optimization of controller parameters, and achieve the effect of overcoming time-consuming and labor-intensive
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0026] Specific embodiment one: a kind of underwater robot trajectory tracking method based on double BP network reinforcement learning framework described in the present embodiment, this method comprises the following steps:
[0027] Step 1. Determine the control parameter k to be designed according to the speed of the underwater robot and the control law of the heading control system 1 、k 2 、k 3 and k 4 ;
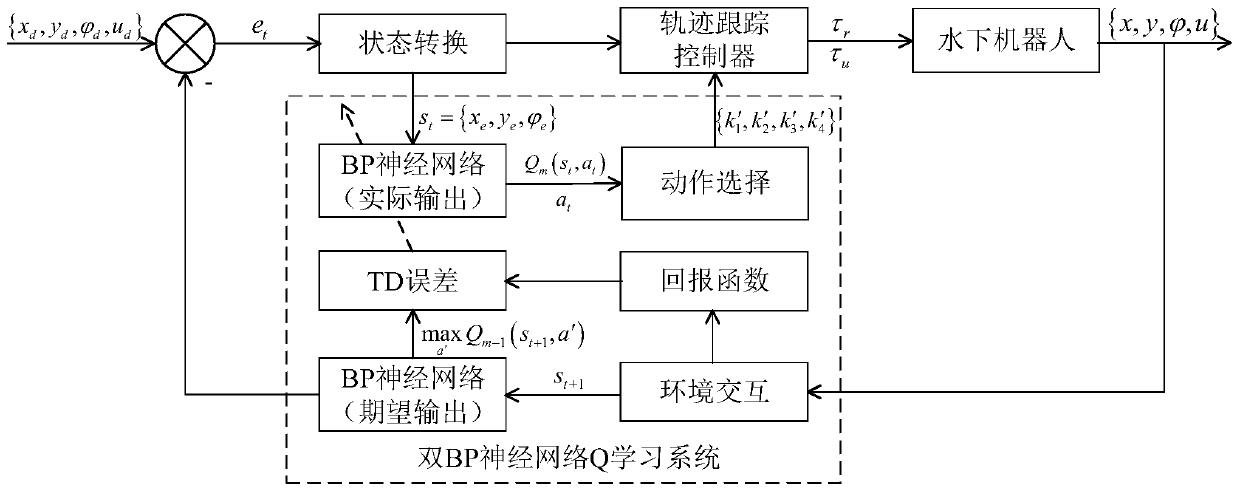
[0028] Step 2, construct double BP neural network structure, the structure of described double BP neural network comprises current BP neural network and target BP neural network, and the structure of target BP neural network is identical with the structure of current BP neural network;
[0029] The input of the current BP neural network is the current state s t , the input of the target BP neural network is the current state s t Execute the optimal action a t The state s at the next moment obtained after t+1 ; Both the current BP neural network and the target BP ne...
specific Embodiment approach 2
[0040] Specific implementation mode two: the difference between this implementation mode and specific implementation mode one is: the specific process of the step one is:
[0041] The control law of the speed and heading control system of the underwater robot is shown in formulas (1) to (3):
[0042]
[0043]
[0044]
[0045] Among them, τ u is the longitudinal thrust of the thruster, m is the mass of the underwater robot, x u|u| , N r|r| , N r are dimensionless hydrodynamic parameters, v is the lateral velocity of the underwater robot, r is the yaw angular velocity of the underwater robot, |r| is the absolute value of the yaw angular velocity of the underwater robot, u is the longitudinal velocity of the underwater robot, |u| is the absolute value of the longitudinal velocity of the underwater robot, u d is the longitudinal expected velocity of the underwater robot, represents the desired longitudinal acceleration of the underwater robot, τ r is the turning...
specific Embodiment approach 3
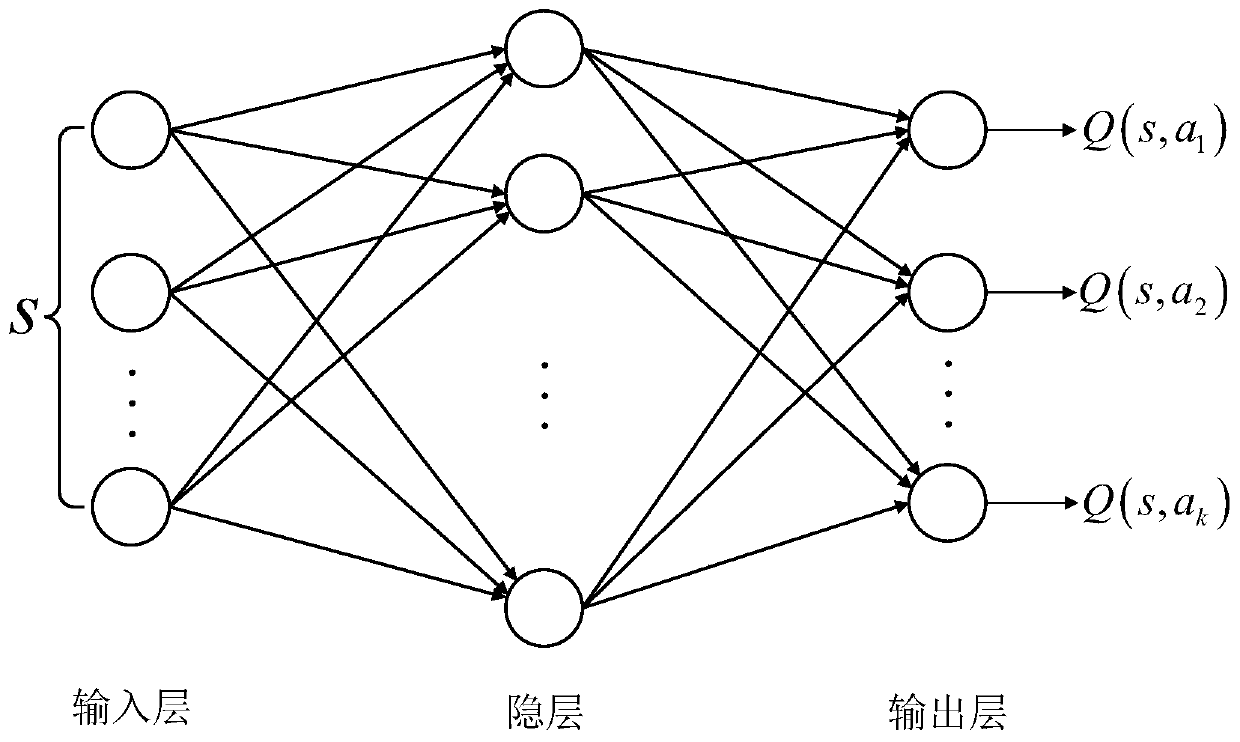
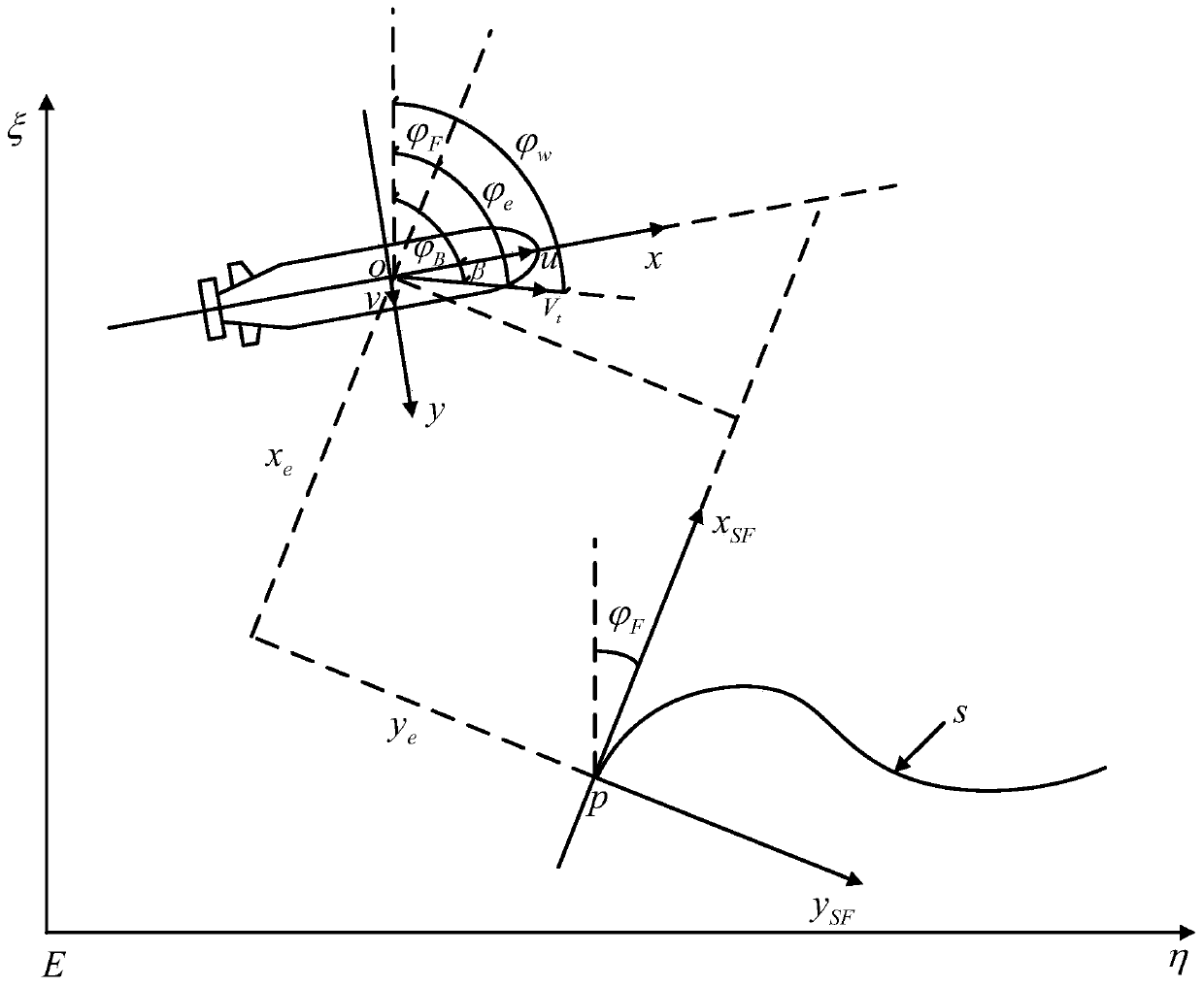
[0060] Specific embodiment three: the difference between this embodiment and specific embodiment two is: in the step two, the input of the current BP neural network is the current state s t , the current state s t Expressed as where: x e 、y e as well as Respectively represent the longitudinal position error, lateral position error and heading angle error of the underwater robot to be controlled and the reference underwater robot in the current state;
[0061] Both the current BP neural network and the target BP neural network determine the output action according to the state of the input, and the expression of the output action is a={k' 1 ,k′ 2 ,k' 3 ,k' 4}, where a is the output action;
[0062] Among them, k′ 1 , k' 2 , k' 3 and k' 4 respectively for the action value k′ 10 , k' 20 , k' 30 and k' 40 The result of division, select k′ 10 ∈[-1,1], k′ 20 ∈[-1,1], put k′ 10 and k' 20 Every 0.5 is divided into 5 action values, select k′ 30 ∈[-0.4,0.4], k′ 4...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More