

Laser radar three-dimensional target rapid detection method based on pseudo-image technology
A technology of three-dimensional targets and laser radar, which is applied in the directions of measuring devices, electromagnetic wave re-radiation, and radio wave measurement systems, can solve the problems of three-dimensional convolution operation that consumes a lot of calculations and cannot be realized, and achieves the goal of improving detection accuracy and rapid detection Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0022] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments, but the protection scope of the present invention is not limited thereto.
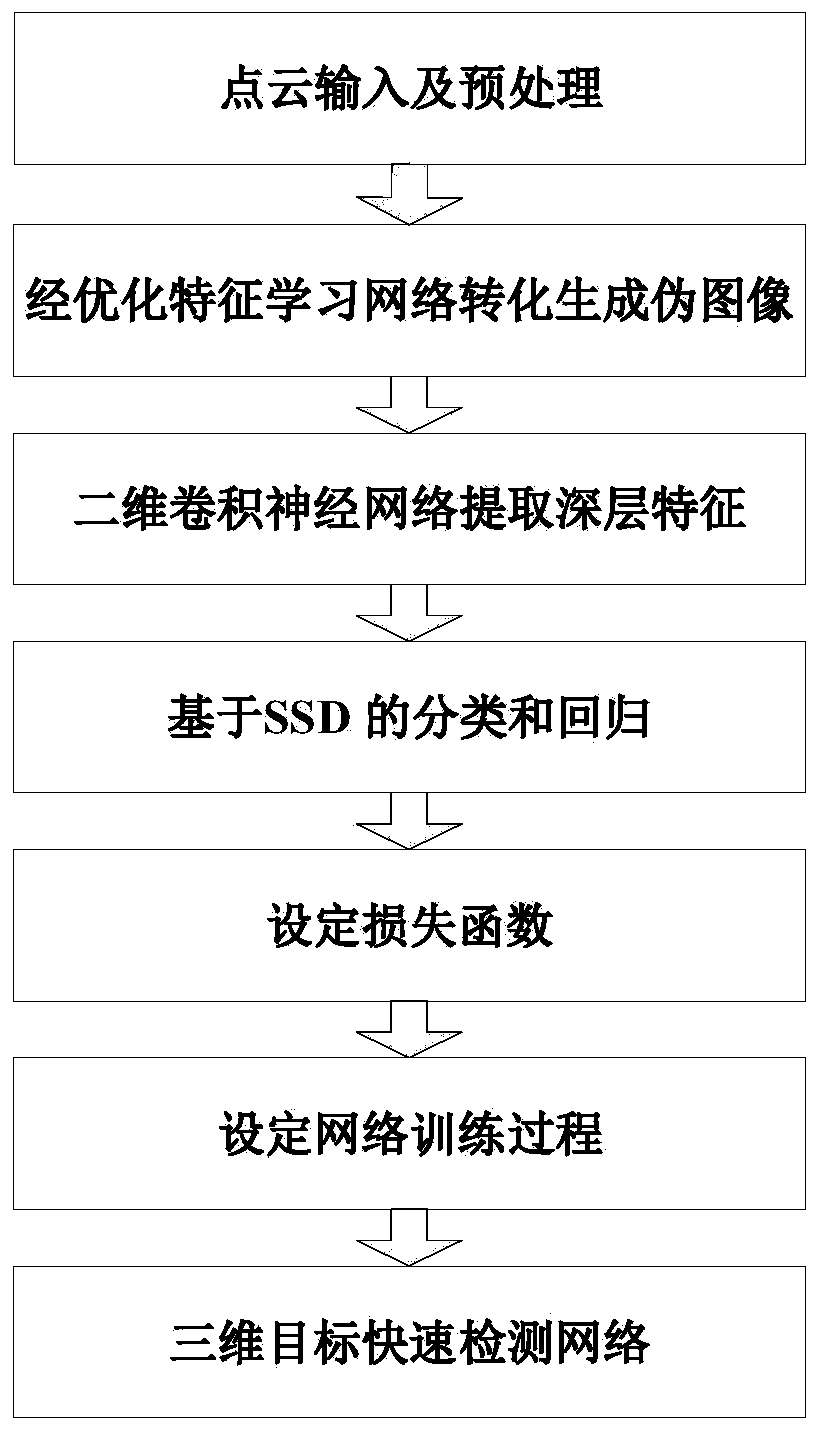
[0023] like figure 1 As shown, the rapid detection method of lidar 3D target based on pseudo-image technology specifically includes the following process:
[0024] Step (1), point cloud data preprocessing
[0025] The lidar collects the surrounding environment of the vehicle, generates the original point cloud data, preprocesses the original point cloud data, and uses the random sampling consensus algorithm (RANSAC) to detect the ground points of the point cloud data. For flat areas, use random sampling consensus The ground point is removed from the entire point cloud data by the algorithm; for uneven areas, the point cloud data is divided into blocks first, and then the ground point is removed from the point cloud data in each block.
[0026] The principle of using the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More