

Cascade control system and method of flexible robot based on time-varying interference compensation
A cascade control and interference compensation technology, applied in the field of flexible robot cascade control system based on time-varying interference compensation, can solve the problems of unmodeled dynamics of the system, difficulty in industrial implementation of control solutions, and high cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
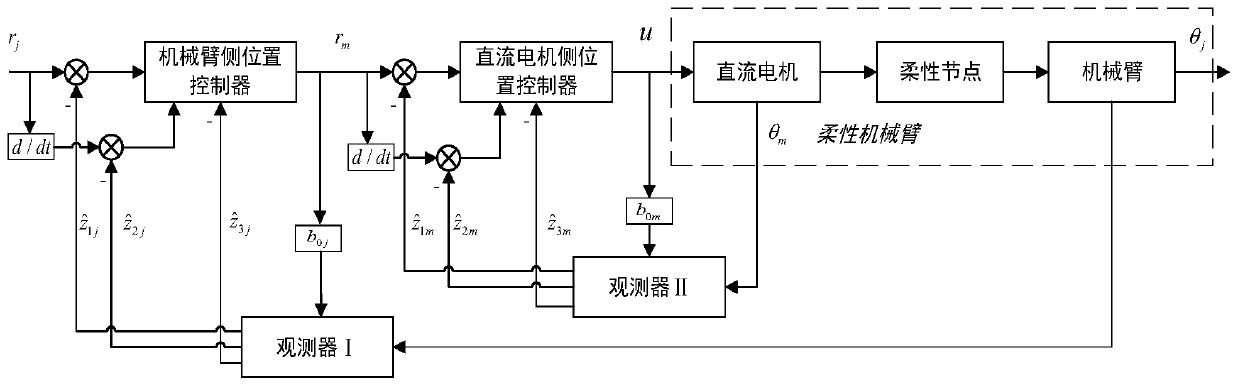
[0053] like Figure 1 to Figure 9 As shown, the present invention is a flexible robot cascade control system based on time-varying disturbance compensation, with figure 1 It is a detailed principle block diagram of the control system of the present invention, the system includes a position controller on the DC motor side, an extended state observer based on the DC motor model, a position controller on the manipulator side, an extended state observer based on the manipulator model, and a DC motor side A position sensor, a position sensor on the side of the manipulator, a DC motor, a flexible node, and a manipulator. The position controller on the side of the manipulator is connected to the position controller on the side of the DC motor. The position controller on the side of the manipulator is connected to the extended state based on the manipulator model The observer is connected, the position controller on the DC motor side is connected to the DC motor, the position controll...
Embodiment 2
[0088] like Figure 1 to Figure 9 As shown, the difference between this embodiment and Embodiment 1 is that a cascade control method for flexible robots based on time-varying disturbance compensation, such as figure 1 As shown, the method includes the following steps:
[0089] 1) Obtain the position of the DC motor by detecting the signal of the position sensor on the DC motor side;
[0090] 2) Obtain the position of the manipulator by detecting the signal of the position sensor on the side of the manipulator;
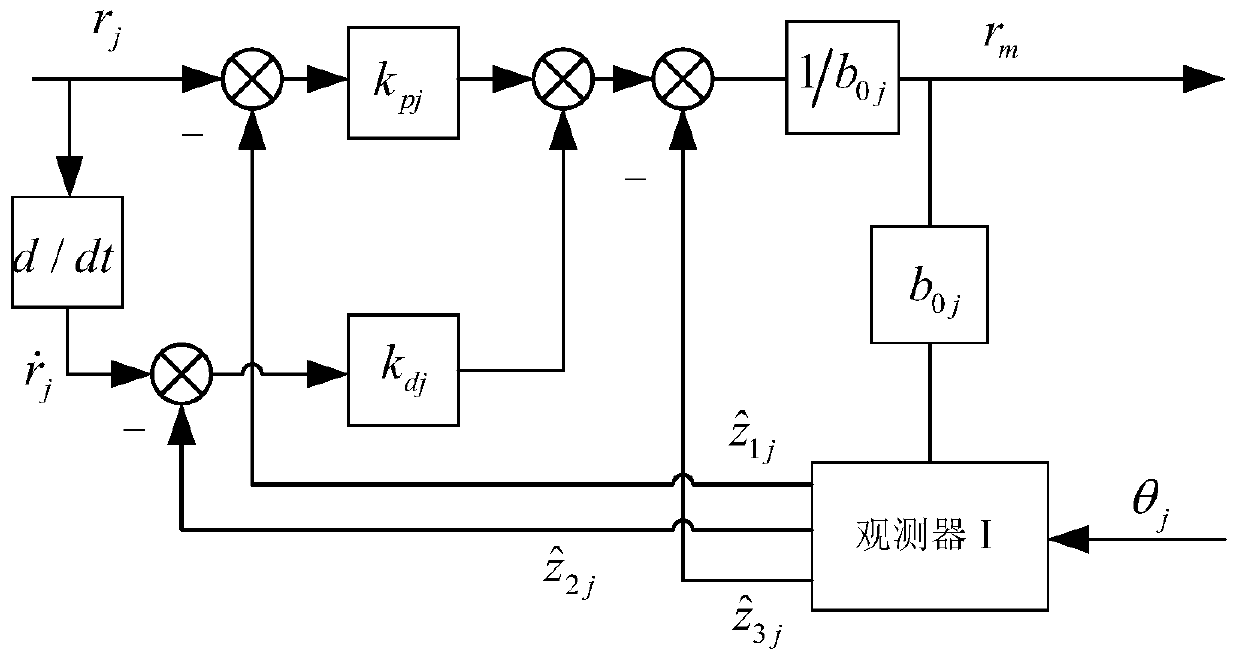
[0091] 3) The signal of the position sensor on the manipulator side and the output control signal of the position controller on the manipulator side are estimated by the extended state observer (namely observer I) based on the manipulator model to obtain the position estimation of the manipulator speed estimation and an estimate of the disturbance
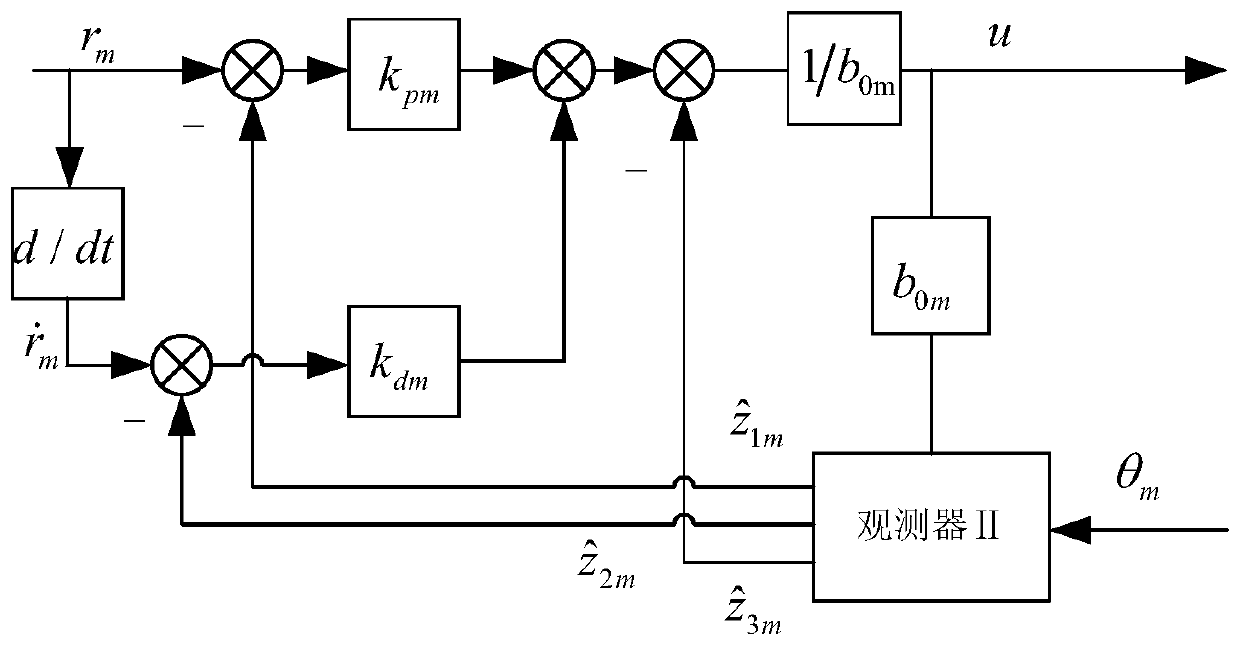
[0092] 4) The signal of the position sensor on the DC motor side and the output control signal of the position co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More