Marine fishing boat trajectory prediction method and system based on Beidou and AIS data fusion
A trajectory prediction and data fusion technology, applied in radio wave measurement system, satellite radio beacon positioning system, measurement device, etc., can solve the problems of inability to effectively realize fishing boat trajectory prediction, inability to directly apply nonlinear system, inability to extract fishing boats, etc. , to achieve the effect of avoiding historical trajectory modeling and spatio-temporal data calculation, high practical value and strong applicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The embodiments of the present invention will be described in further detail below with reference to the accompanying drawings, but the present invention can be implemented in many different ways defined and covered by the claims.
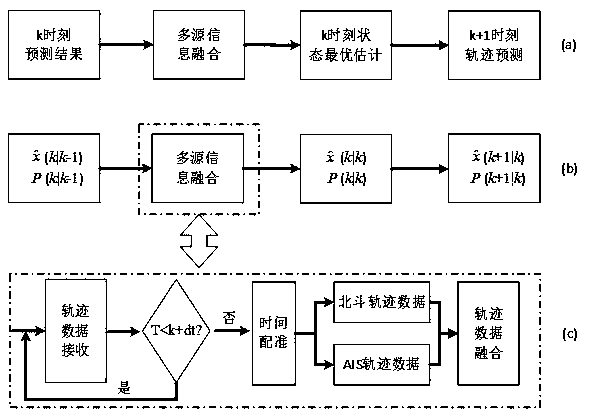
[0033] like figure 1 As shown, the main steps of the marine fishing boat trajectory prediction method based on Beidou and AIS data fusion of the present invention include:
[0034] Step a), performing time registration on the multi-source data, inputting the observation value time series of Beidou and AIS, and synchronizing the observation data of each sensor for the same target to the same time line;
[0035] Step b), according to the result of the time registration of the AIS trajectory data and the Beidou trajectory data, fuse the AIS data and the Beidou data;
[0036] Step c), filter the trajectory according to the result of the fusion of the AIS data and the Beidou data, obtain the optimal state estimate at the current moment, and perf...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com