

Automatic parking active braking test method based on CAN bus programming
A CAN bus and automatic parking technology, which is applied in electrical testing/monitoring, testing/monitoring control systems, general control systems, etc., can solve problems such as inability to perform active braking performance simulation tests, failure to meet pilot testing and calibration requirements, etc. , to achieve the effect of facilitating brake calibration test, shortening development cycle and reducing workload
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
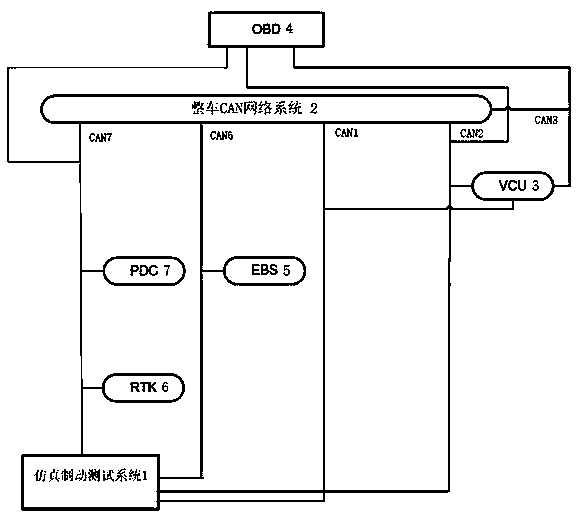
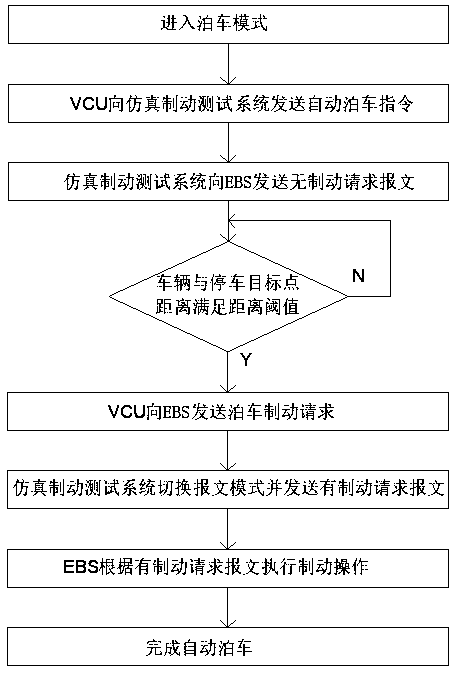
[0064] The vehicle starts to enter the parking mode when it is 20 meters away from the parking target point in a straight line. At this time, the vehicle speed is 8km / h. VCU 3, ECU of EBS 5 and RTK 6 coordinate and control the vehicle to perform automatic parking. The VCU 3 sends an automatic parking start command to the simulated braking test system 1 through the CAN1 bus. In this embodiment, the value of the first distance is 3m. When the VCU 3 judges that the vehicle is 10m away from the parking target point through RTK 6, the vehicle first accelerates and then drives at a constant speed. When the vehicle is 3m away from the parking target point, the VCU 3 sends a message to the EBS5. Parking brake request, EBS 5 sends a parking brake command to the simulation brake test system 1, the simulation brake test system 1 switches the message mode, and sends a parking brake command to EBS 5 through the gateway of the vehicle CAN network system 2 The brake request message includes:...
Embodiment 2
[0067] The vehicle starts to enter the parking mode when the straight-line distance from the parking target point is 20m. At this time, the vehicle speed is 5km / h. VCU 3, EBS5 ECU and RTK 6 coordinate and control the vehicle to perform automatic parking. The VCU 3 sends an automatic parking start command to the simulated braking test system 1 through the CAN1 bus. In this embodiment, the value of the first distance is 3m, and the value of the second distance is 0.7m.
[0068] When VCU 3 judges that the vehicle is 10m away from the parking target point through RTK 6, the vehicle first accelerates and then drives at a constant speed. Send a parking brake command, simulate the brake test system 1 to switch the message mode, and send a brake request message to the EBS 5 through the gateway of the vehicle CAN network system 2. The brake request message includes: The dynamic safety level is the first level, the braking priority is the highest level, the deceleration value of the fi...
Embodiment 3
[0072]When the vehicle is performing automatic parking (that is, during the whole process of acceleration-constant speed-braking), the PDC 7 will sound an alarm when it detects an obstacle within 3m, and the controller of the PDC 7 will feedback The relevant message signal is sent to VCU3, and VCU 3 sends a parking emergency braking command to the simulated brake test system 1, and the simulated brake test system 1 will send a braking request report containing a large braking deceleration value. The text is given to EBS 5, and the emergency braking is performed by EBS 5. The braking request message includes: the braking safety level is emergency, the braking priority is the highest level, the emergency deceleration value is 3m / s², and the hydraulic brake actuator is driven to perform emergency braking operation. stop.
[0073] The test results show that: EBS 5 can normally respond to the braking demand of the simulated brake test system 1, and when an obstacle suddenly appear...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More