

A multi-vehicle joint absolute positioning method based on Internet of Vehicles
An absolute positioning and Internet of Vehicles technology, applied in the field of multi-source fusion navigation, can solve problems such as centimeter-level high-precision positioning, RTK’s difficulty in obtaining fixed ambiguity solutions, and poor geometric structure of satellites. Enhanced operability and improved solution performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
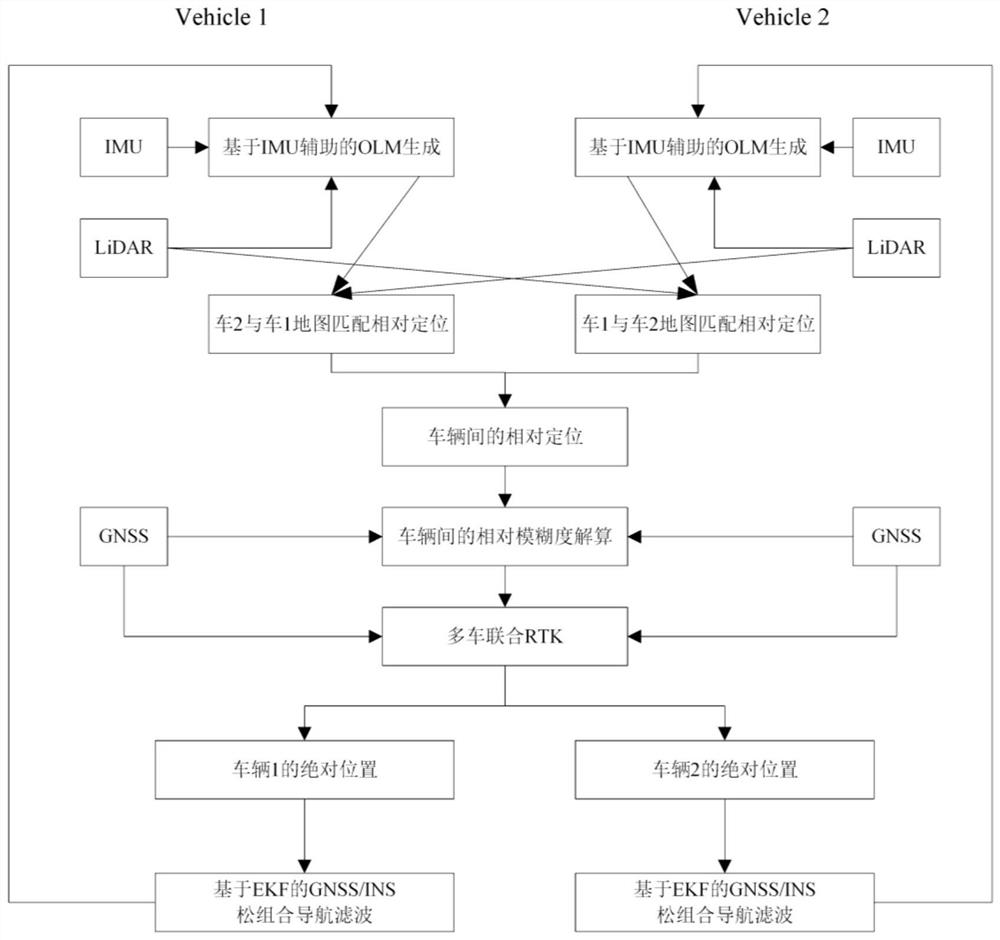
[0097] A multi-vehicle joint absolute positioning method based on the Internet of Vehicles provided by the present invention utilizes sensors such as GNSS, INS, and laser radar equipped with intelligent vehicles, and the characteristics that multi-vehicle data can be jointly processed under the condition of Internet of Vehicles, the multi-vehicle Joint processing of GNSS, INS and lidar data. This method is an epoch-by-epoch process. Each vehicle uses its own GNSS position results and INS to perform EKF loose combination to estimate the combined navigation results of the current vehicle, including position, velocity and attitude. Secondly, the high-precision relative positioning between vehicles is realized through multi-vehicle lidar data, which mainly uses the simultaneous localization and mapping method (SLAM) of INS-assisted lidar, the feature matching method of frame and map matching, etc.; and then in A GNSS double-difference observation model is constructed between vehic...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More