A multi-carrier AGV control system capable of omnidirectional movement and its control method
An omnidirectional movement and control system technology, applied in the multi-load AGV control system and its control field, can solve the problems such as insufficient use, insufficient stability of the mecanum wheel, uncontrolled system design and description, etc., to achieve good accuracy and stability. , Strong follow-up expansion, good accuracy and stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
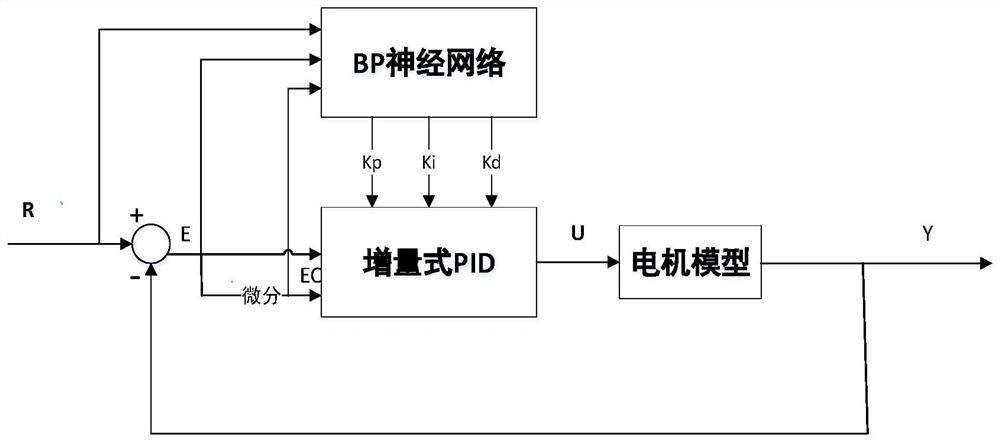
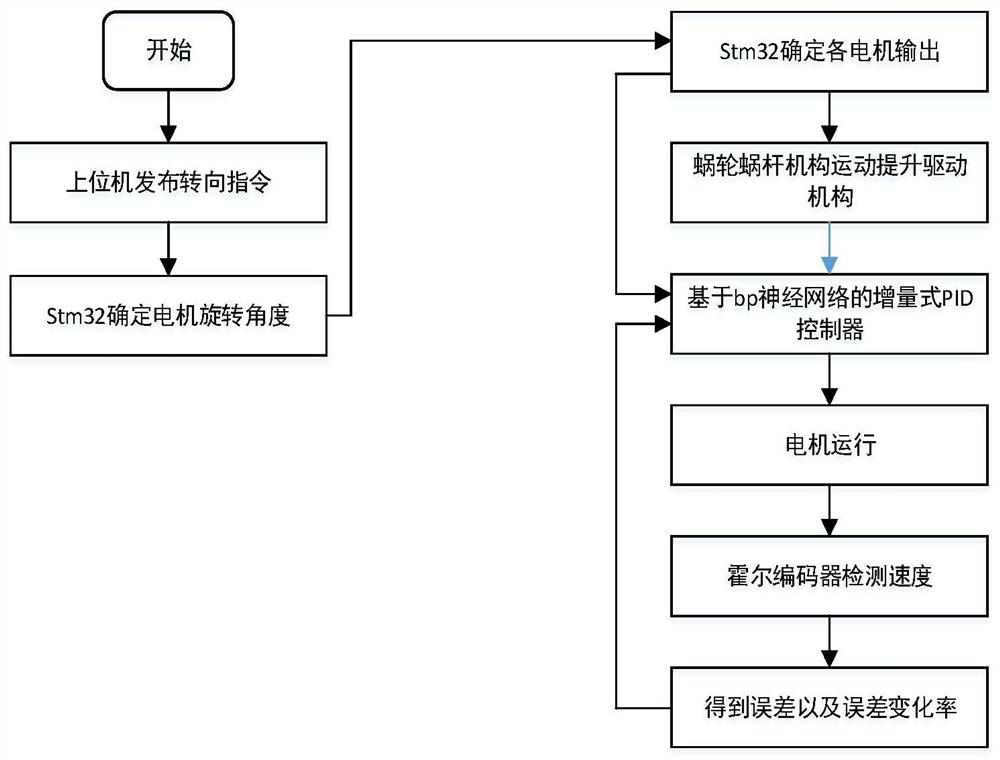
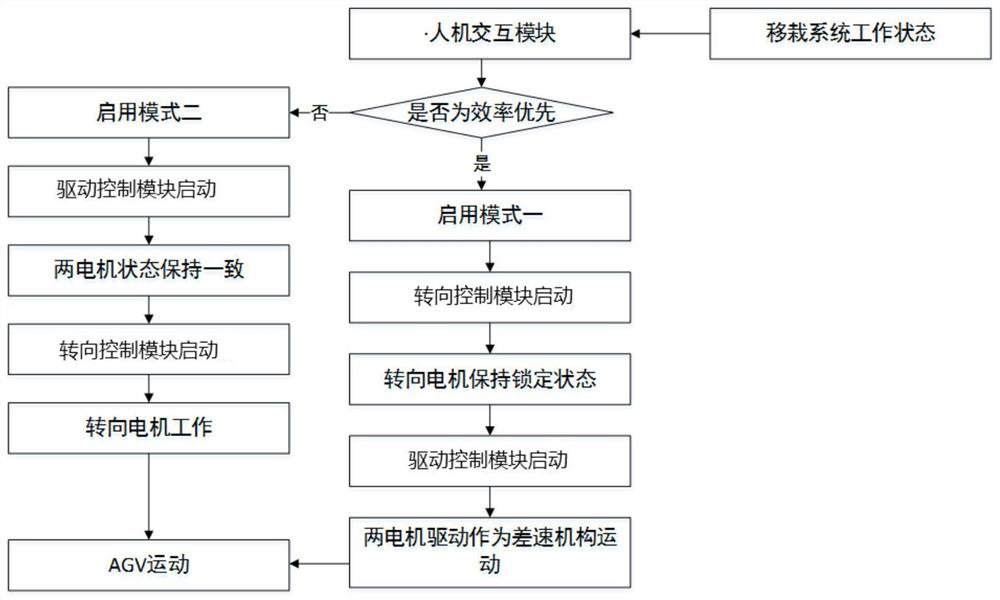
[0053] Embodiment: An omnidirectional mobile multi-carrier AGV control system is composed of a main control module, a steering control module, a drive control module, a multi-cargo transfer module, a human-computer interaction module, a power supply module and a communication module; the main control module uses In order to control the execution of the predetermined task of the AGV, the incremental PID method of the BP neural network is used to realize the precise steering of the AGV and supply power to the power module; the steering control module is used to control the precise steering of the AGV and is electrically connected to the main control module; the drive control module , used to control the AGV to move forward and backward at a certain speed; electrically connected to the main control module; the multi-cargo transfer module, used to control the AGV to move to the place where the goods are to be picked up to accurately take out the items on the shelf, and electrically ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More