

A disinfection robot
A robot and task technology, applied in disinfection, equipment, construction, etc., can solve the problems of low robot cooperation ability, low intelligence, cross-infection, etc., to reduce the amount of information communication and hardware overhead, reduce the difficulty of use and compatibility, Reduced effect of map location updates
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments, wherein the schematic embodiments and descriptions are only used to explain the present invention, but are not intended to limit the present invention.
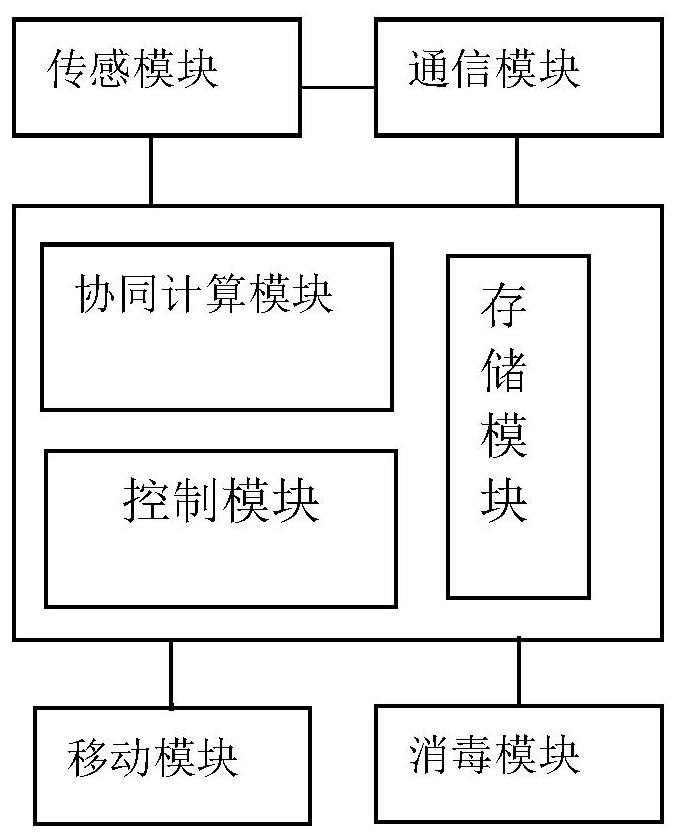
[0027] A kind of disinfection robot applied in the present invention is described in detail, as attached figure 1 As shown, the disinfection robot performs disinfection work in the area through collaborative work; the disinfection robot performs movement and non-centralized collaborative control based on the map; through the non-centralized collaborative control, after the introduction of the disinfection robot for disinfection, there is no need to The building management method or the disinfection system can be transformed, and one or more disinfection robots can be put in and used immediately; when there are no other sensing devices for external environment detection, the disinfection robot c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More