

Mechanical arm control system achieving positioning through vision
A control system and visual positioning technology, applied in the field of intelligent manipulators, can solve problems such as difficult positioning of manipulators, achieve the effects of enhancing interactivity, saving costs, and facilitating viewing and analysis
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
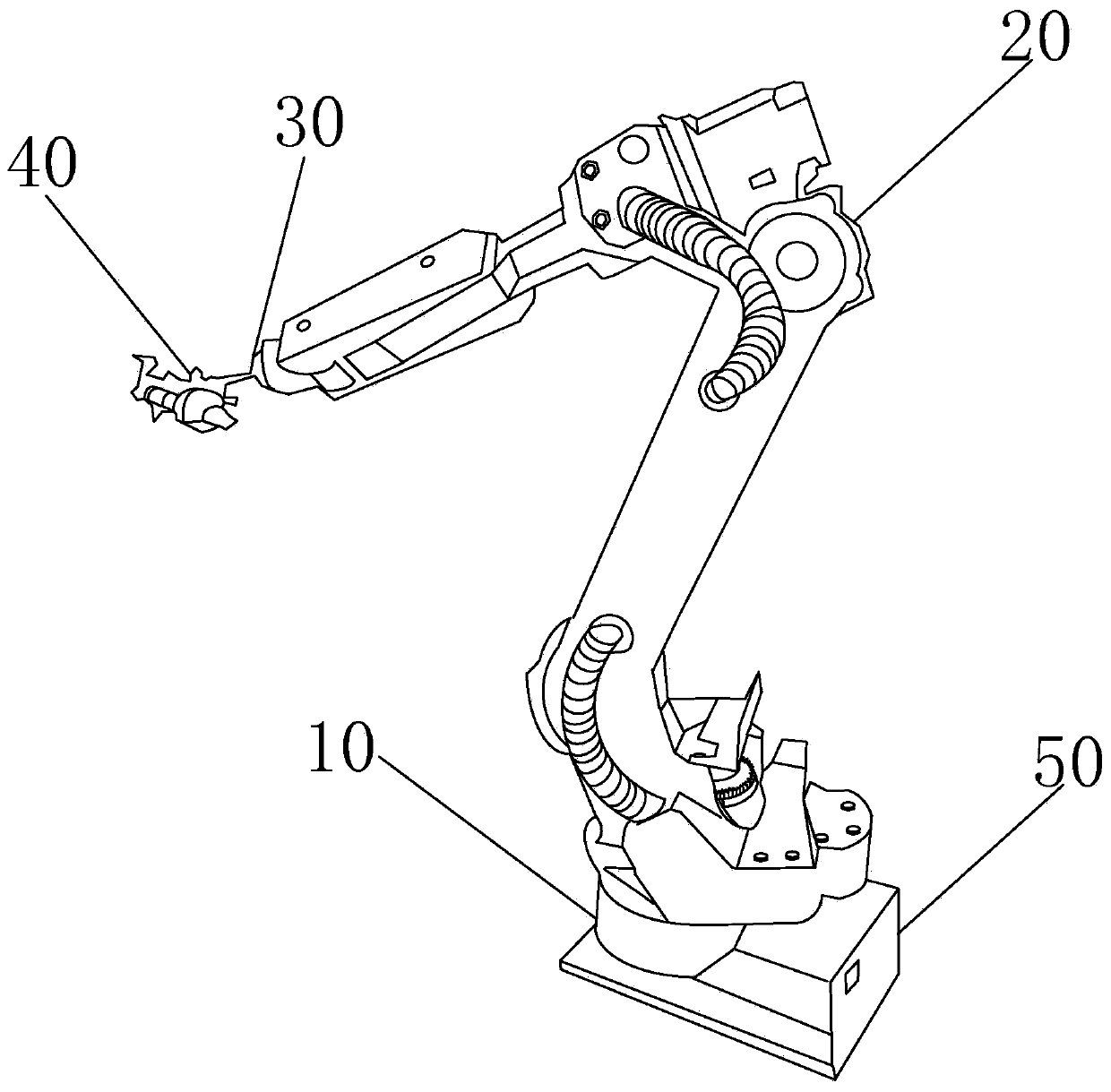
[0059] see figure 1 , is a schematic diagram of the appearance structure of a manipulator of a manipulator control system through vision positioning according to an embodiment of the present invention.
[0060] Among them: the first-level manipulator joint shaft control bearing 10; the second-level manipulator joint shaft control bearing 20; the third-level manipulator joint shaft control bearing 30; the industrial camera 40; the actuator 50.
[0061] The actuator is used to control the operation of the robotic arm.
[0062] The industrial camera is used to collect pictures and video images, and send the data to the controller, and the controller analyzes the data collected by the industrial camera.
[0063] The schematic diagram of the appearance and structure of the robotic arm marks the specific position of the device. The position of the actuator can be changed to other positions, and the position of the industrial camera can also be adjusted according to the user's own n...
specific Embodiment approach
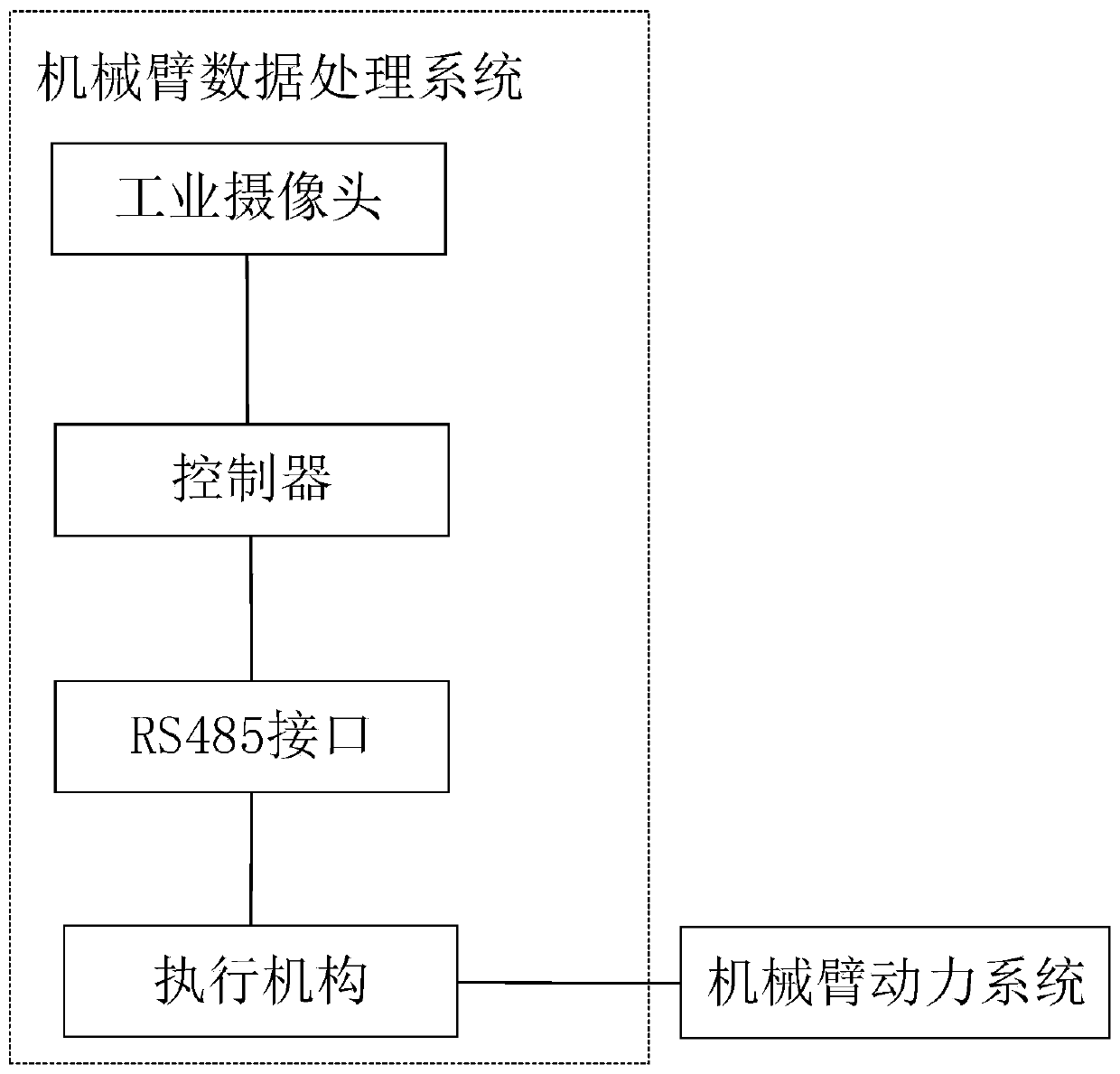
[0109] The mechanical arm is powered on, installed on the robot body, and reaches the work site through the movement of the robot body. The industrial camera collects image data through the binocular camera, and the image data is transferred to the actuator through the RS485 interface.
[0110] The actuator performs target detection and recognition according to the algorithm, and then sends the measured distance signal to the nearest joint axis of the manipulator, and sends it to the power system of each joint axis through different coordinate transformations to control the movement of the manipulator.
[0111] The specific process takes flame detection as an example:
[0112] The whole process is divided into target detection and depth ranging.
[0113] First train the deep learning model offline. Collect a large number of flame-related pictures, extract image features through convolutional neural network, and then use CNN, YOLO and other algorithms to train a flame recognit...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More