

Mobile equipment positioning method, device and system and mobile equipment
A technology for mobile devices and positioning systems, which can be used in measurement devices, instruments, navigation, etc., and can solve the problems of low robustness and low positioning accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
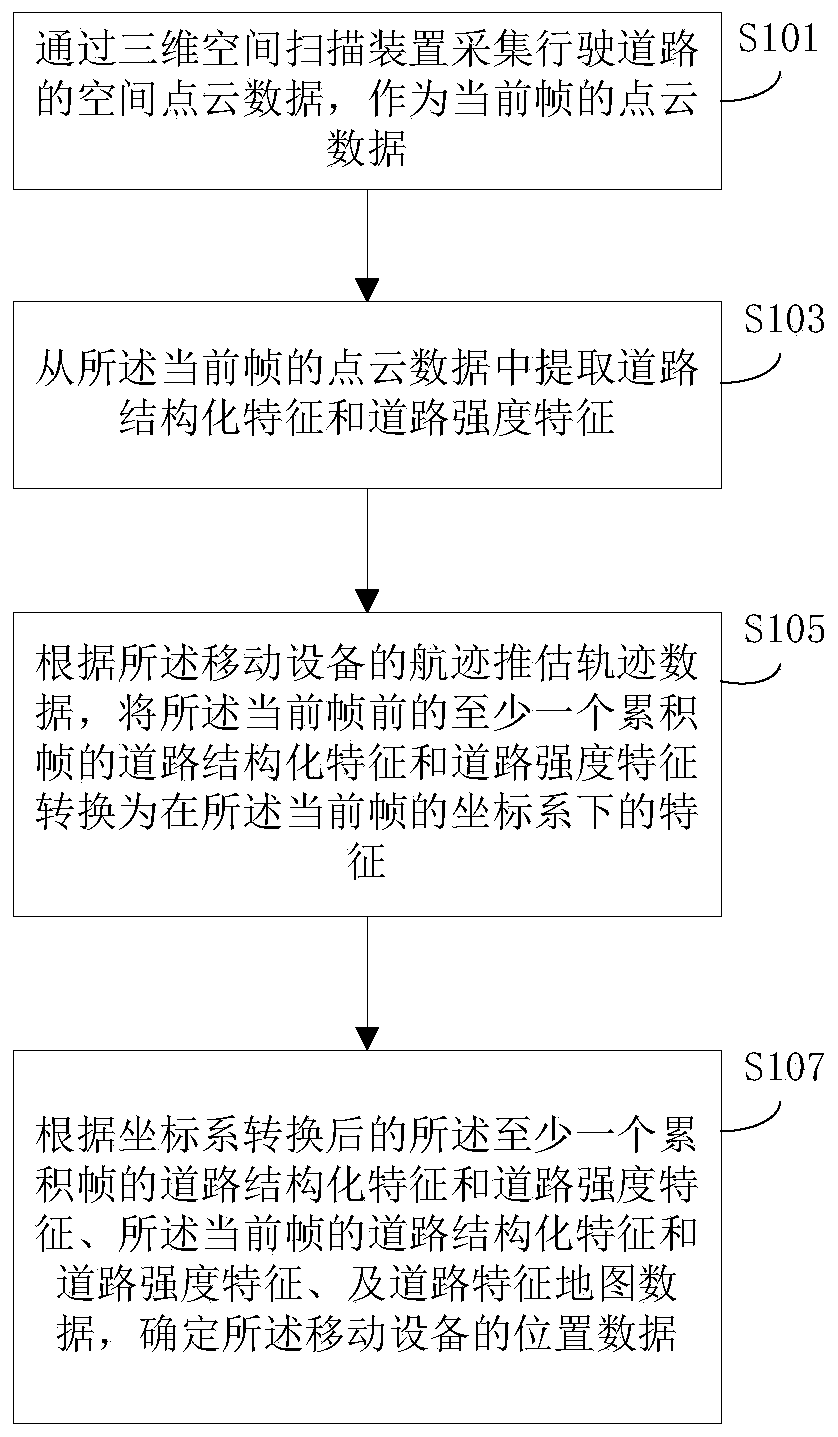
[0108] Please refer to figure 1 , which is a flow chart of an embodiment of a method for locating a mobile device provided in the present application. The execution body of the method includes a device for locating a mobile device, and the device can be deployed on a mobile device. A mobile device positioning method provided by this application includes:
[0109] Step S101: Collect the spatial point cloud data of the driving road by the three-dimensional space scanning device as the point cloud data of the current frame.
[0110] In the method provided in the embodiment of the present application, when the vehicle is running, the three-dimensional space scanning device installed on the vehicle acquires the spatial coordinates of each sampling point on the surface of the object in the space around the road, and obtains a set of points, each The massive point data obtained in the second scan is called a frame of point cloud (Point Cloud) data. In this embodiment, the frame of p...
no. 2 example
[0170] Please see Figure 9 , which is a schematic diagram of an embodiment of the device for locating mobile equipment of the present application. Since the device embodiment is basically similar to the method embodiment, the description is relatively simple, and for relevant parts, refer to the part of the description of the method embodiment. The device embodiments described below are illustrative only.
[0171] The present application additionally provides a positioning device for mobile equipment, including:
[0172] The point cloud data collection unit 901 is used to collect the spatial point cloud data of the driving road through the three-dimensional space scanning device as the point cloud data of the current frame;
[0173] The current frame road feature extraction unit 903 is configured to extract road structural features and road strength features from the point cloud data of the current frame;
[0174] The accumulated frame road feature conversion unit 905 is c...
no. 3 example
[0187] Please refer to Figure 12 , which is a schematic diagram of a mobile device embodiment of the present application. Since the device embodiment is basically similar to the method embodiment, the description is relatively simple, and for related parts, please refer to part of the description of the method embodiment. The device embodiments described below are illustrative only.
[0188] A mobile device in this embodiment includes: a three-dimensional space scanning device 1201 , a processor 1202 and a memory 1203 .
[0189] The memory is used to store the program for realizing the positioning method of the mobile device. After the device is powered on and runs the program of the positioning method for the mobile device through the processor, the following steps are performed: the spatial points of the driving road are collected by the three-dimensional space scanning device Cloud data, as the point cloud data of the current frame; extracting road structural features an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More