Unmanned aerial vehicle obstacle avoidance system and control method thereof
A control method and technology of unmanned aerial vehicles, applied in non-electric variable control, control/regulation systems, unmanned aerial vehicles, etc. system problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The aforementioned and other technical contents, features and effects of the present invention will be clearly presented in the following detailed description of a preferred embodiment with reference to the accompanying drawings. The directional terms mentioned in the following embodiments, such as: up, down, left, right, front or back, etc., are only referring to the directions of the drawings. Accordingly, the directional terms are used to illustrate and not to limit the invention.
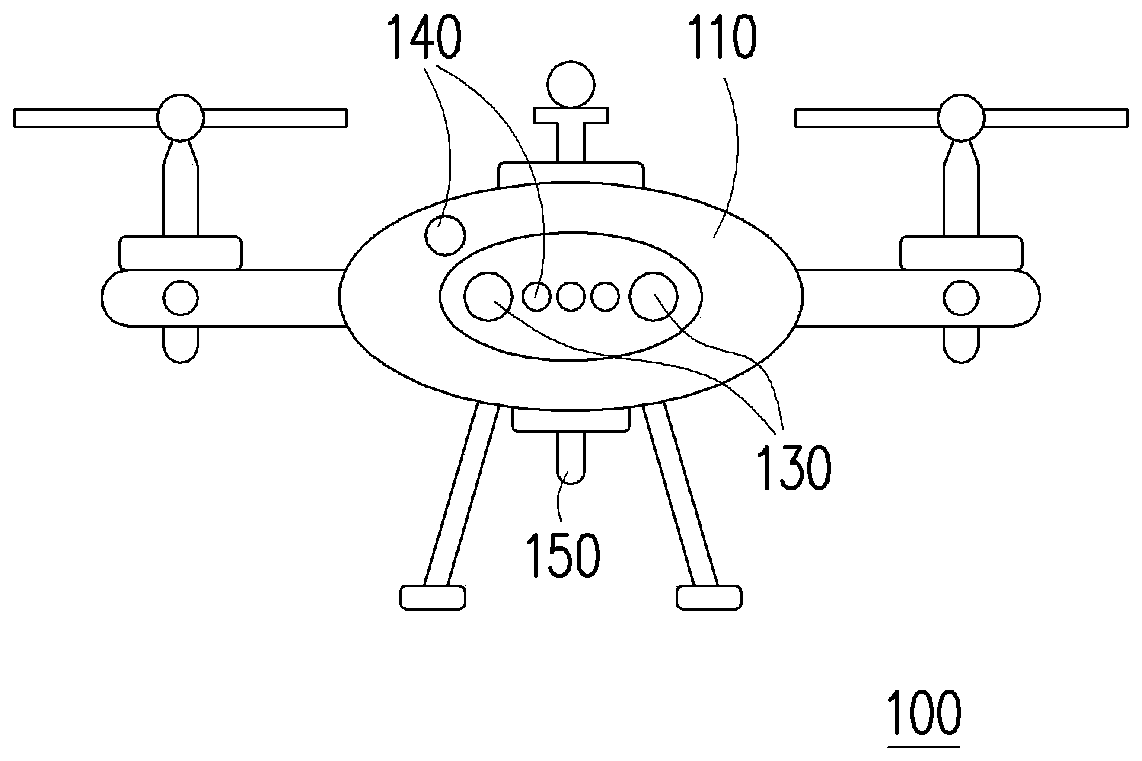
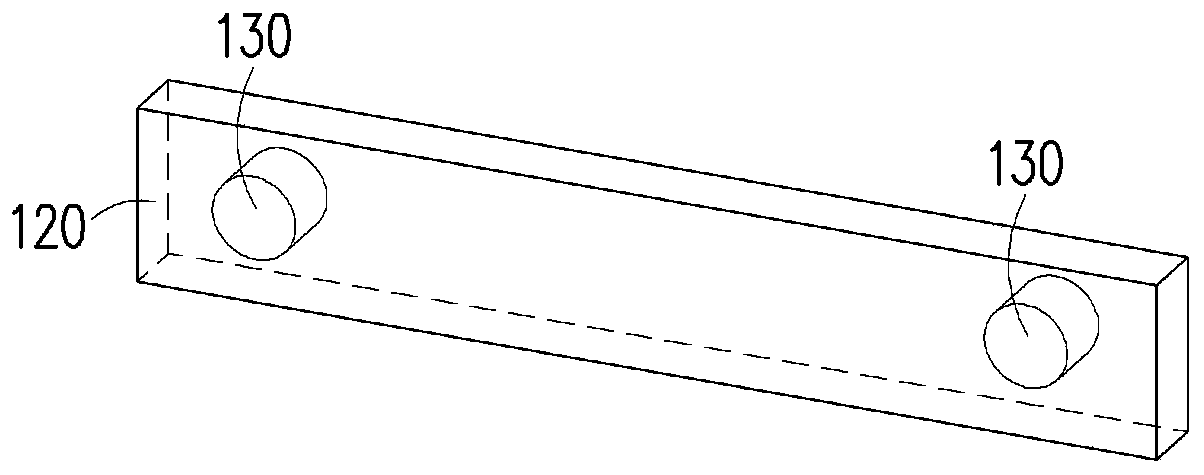
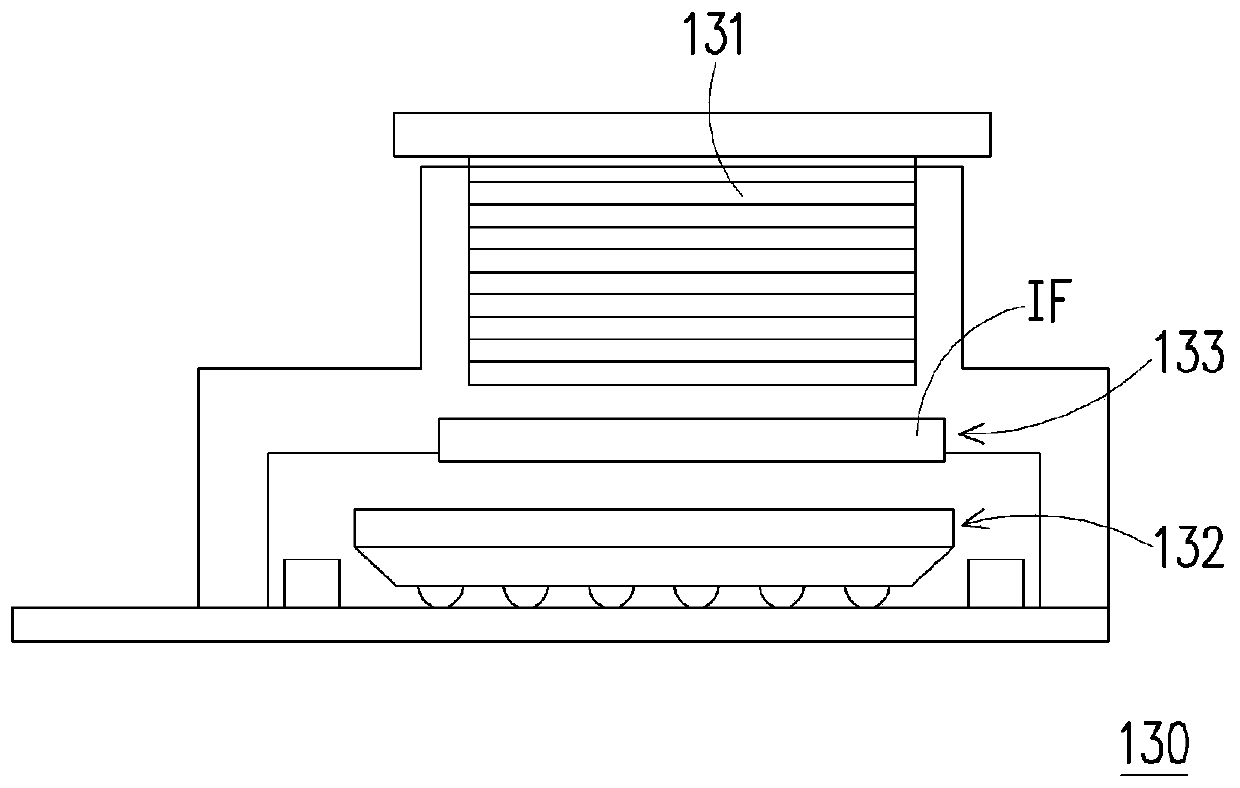
[0025] figure 1 It is a schematic front view of a UAV obstacle avoidance system 100 according to an embodiment of the present invention. Figure 2A yes figure 1 A schematic structural diagram of a cover body 120 and an obstacle avoidance lens module 130 . Figure 2B yes figure 1 A schematic diagram of the internal structure of the obstacle avoidance lens module 130. Figure 2C yes Figure 2B A schematic diagram of the internal structure of the sensing unit 132 . Figure 2D yes Fi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



