

Point cloud map construction method and device, computer equipment and storage medium
A technology for constructing methods and maps, applied in the computer field, which can solve problems such as large initial value uncertainty and easy convergence of nonlinear optimization to errors.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] In order to make the purpose, technical solution and advantages of the present application clearer, the present application will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present application, and are not intended to limit the present application.
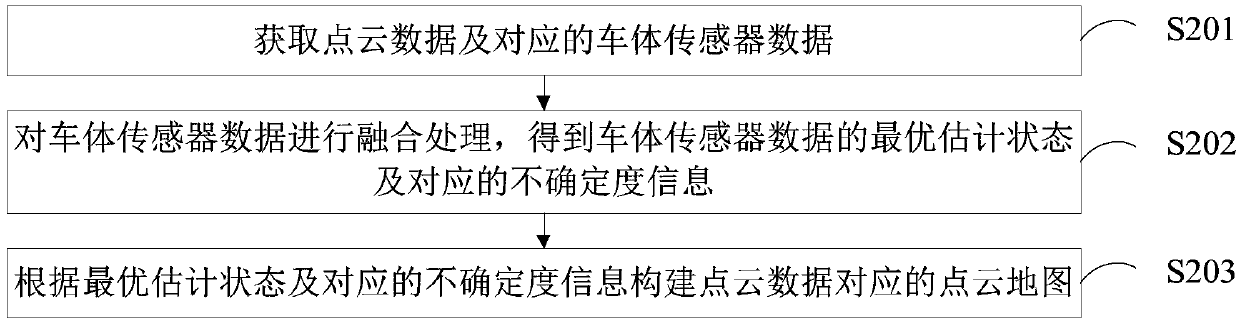
[0047] In one embodiment, such as figure 1 As shown, a method for constructing a point cloud map is provided, including the following steps:
[0048] Step S201, acquiring point cloud data and corresponding vehicle body sensor data;
[0049] This embodiment can be applied to a terminal or a server, and this embodiment is not limited. The terminal can be a personal computer, a notebook computer, a smart phone, a tablet computer, etc., and the server can be an independent server or a plurality of servers. server cluster; this method can be applied to autonomous driving or m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More