

Bionic hexapod robot crab control system
A technology of control system and robot crab, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve problems such as poor adaptive walking ability, and achieve the effects of high speed, good obstacle avoidance ability, and reduced energy consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
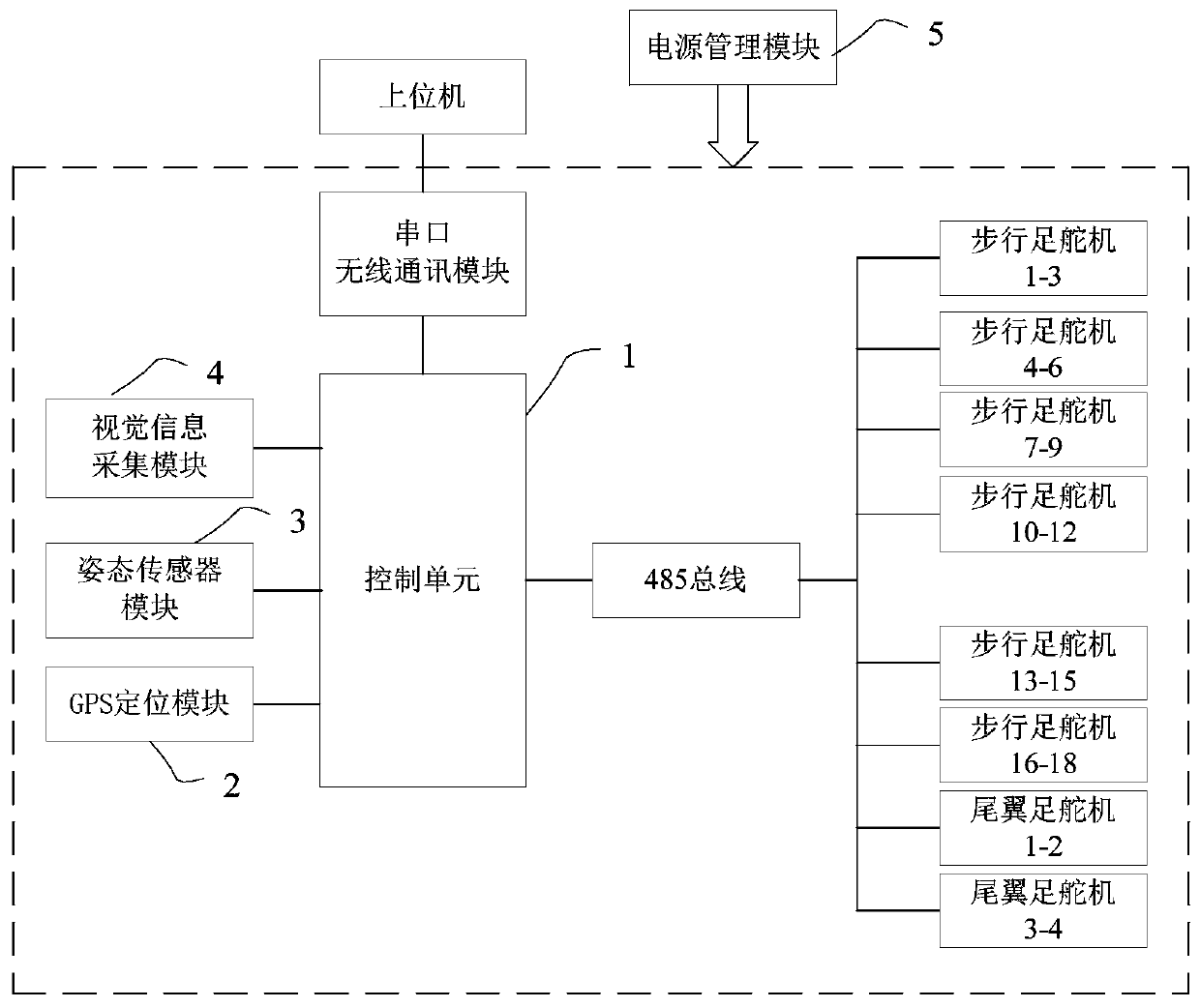
[0043] Specific implementation mode one: the following combination figure 1 Describe this embodiment, the bionic hexapod robot crab control system described in this embodiment includes a control unit 1, a GPS positioning module 2, an attitude sensor module 3 and a visual information collection module 4,
[0044]The GPS positioning module 2 is used to collect the positioning signal of the hexapod robot crab;
[0045] The attitude sensor module 3 is used to collect the attitude angle, angular velocity and acceleration signals of the hexapod robot crab;
[0046] The visual information collection module 4 is used to collect the visual image in the walking process of the hexapod robot crab;
[0047] Each joint of the robot crab body's six-legged legs and two tail legs transmits control commands to the actuator through the steering gear and feeds back the corresponding joint angles, joint speeds and joint torques;
[0048] The control unit 1 calculates the motion state of the robo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More